好盈电调DroneCAN通信设置
功能
具有 CAN 接口的 Hobbywing 电子速度控制器支持 DroneCAN 协议。该协议使得自动驾驶系统能够通过 CAN 总线来控制电子速度控制器/电机,同时还能获取电机的转速、电压、电流和温度等参数。
连接与配置
接线:将1号电机的can线连接X6飞控的CAN1(或CAN2),通过地面站与飞控连接,设置以下参数,然后重启飞控。
Serial8_protocol设置为22
CAN_P1_DRIVER设置为 1 (First Driver)
CAN_D1_PROTOCOL设置为 1 (DroneCAN)
CAN_P1_BITRATE设置500000 (电调出厂时的波特率是500000,飞控的波特率是1,000,000,相同波特率的can外设可并联一个接口)
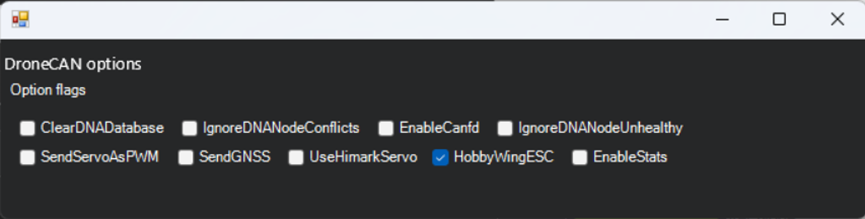
CAN_D1_UC_OPTION 设置为128,使 “好盈电调” 被勾选
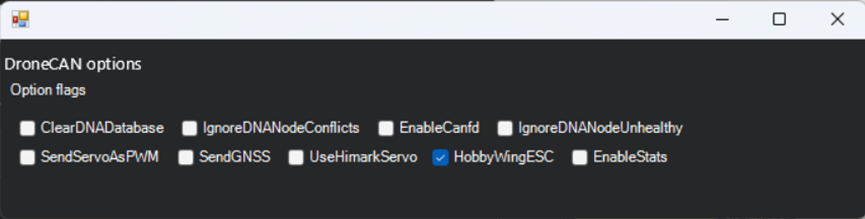
CAN_D1_UC_ESC_BM 以配置通过 CAN 传输的伺服输出。对于大多数四轴飞行器,应将其设置为 15 以将输出 1-4 发送到 DroneCAN。其他机型按实际勾选。

参数配置完成后重启飞控。
电调配置
下面说明如何配置每个ESC使用正确的波特率和单独的 ID。
作这步前需要先配置好飞控的参数。
默认电调出厂所有node ID和throttle id都是1(第一个电机),所以需要配置电调node id和throttle id。
操作如下:
测试电调通信
- 接线:将所有电调can线连接X6飞控的CAN1(或CAN2)
- 给电调供电,它们应该停止发出哔哔声表示通过自检部分好盈电调需要接pwm信号才能通过自检。
- 使用MissionPlanner 的初始设置→必要硬件→ Motor Test 页面的“Test All Motors”,所有电机都应该旋转,说明CAN通信正常。
接下来
配置每个电调ID
接线:先只接电机1,其他电机can信号线不接
- 下载并安装 DroneCAN Gui(版本 1.2.25 或更高版本)
确定飞控的 MAVLink 或 SLCAN COM 端口。
打开 DroneCAN GUI
- 连接到 MAVLink 或 SLCAN COM 端口
- 按下 “Set local node ID” 字段右侧的勾选,将其去掉。
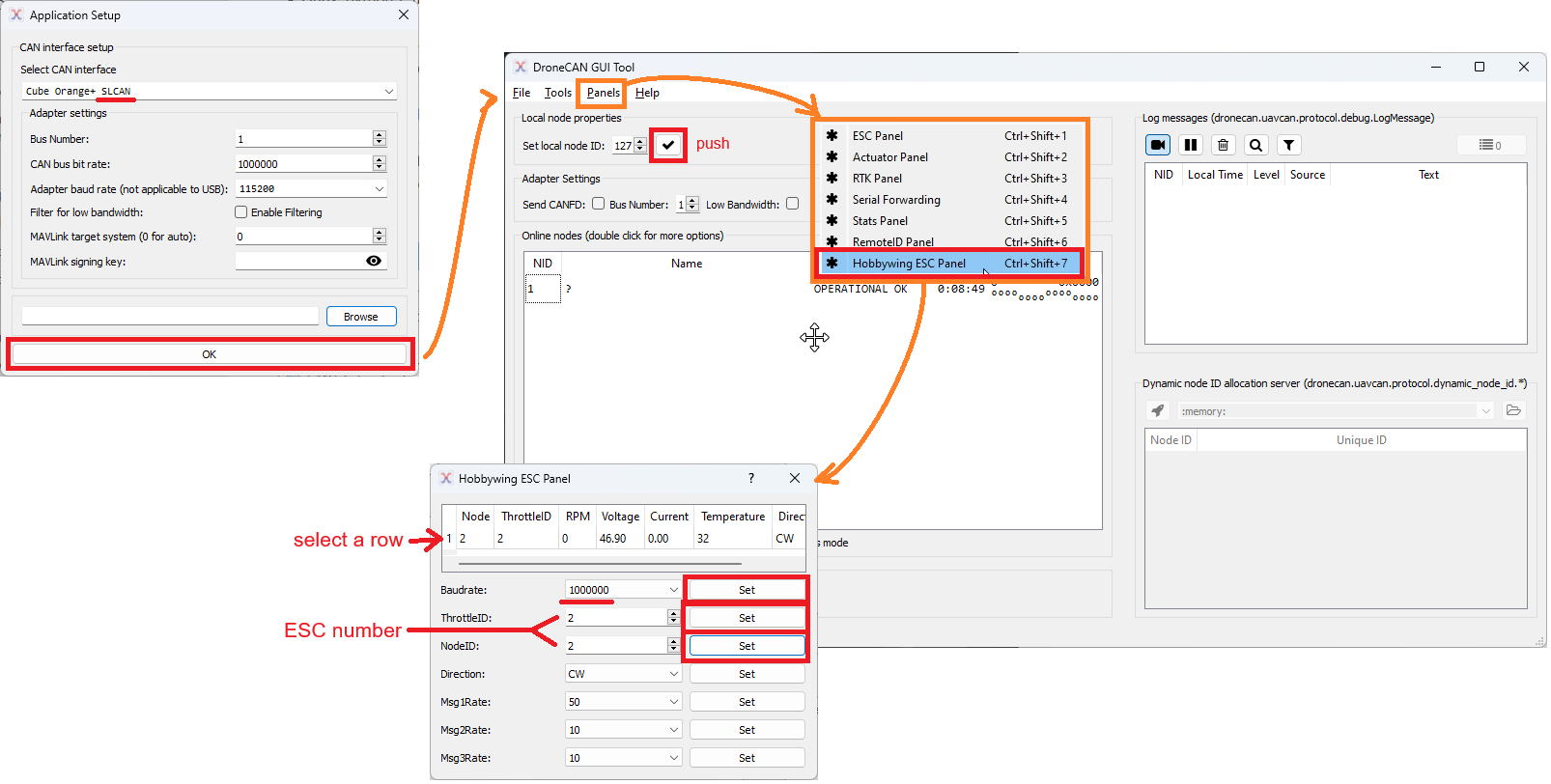
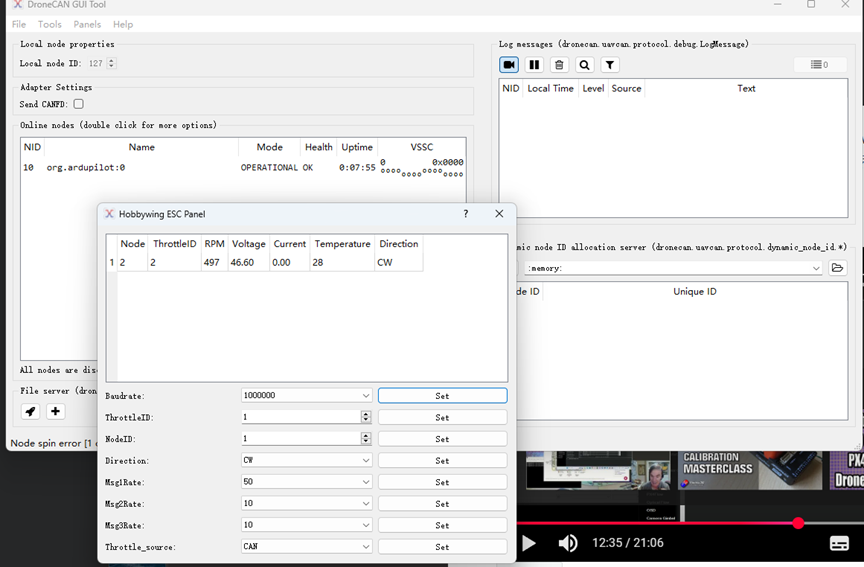
- 选择pannels→hobbywing ESC Panel
- 将波特率设置为1000000
- 填入ThrottleID 和 NodeID为ESC编号,点set。
- 此ESC编号对应于飞控的伺服/PWM输出端口号通常情况s四旋翼默认参数servo1_function=motor1,servo2_function=motor2,servo3_function=motor3,servo4_function=motor4,则需要正常配置电调id顺序即可。若是servo2_function设置成motor1,油门控制则不正确。
- 例如:pwm信号接在servo9到12通道,电调则设置nodeid和throttle id为9到12
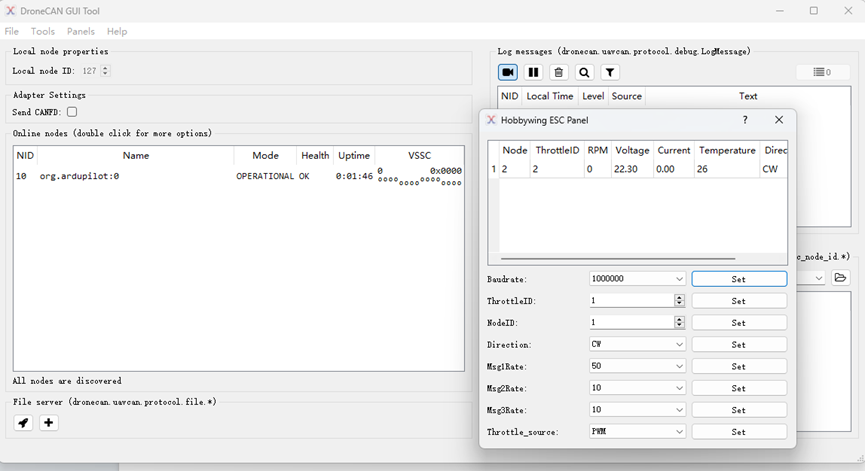
顶部表中的值应在几秒钟内更新
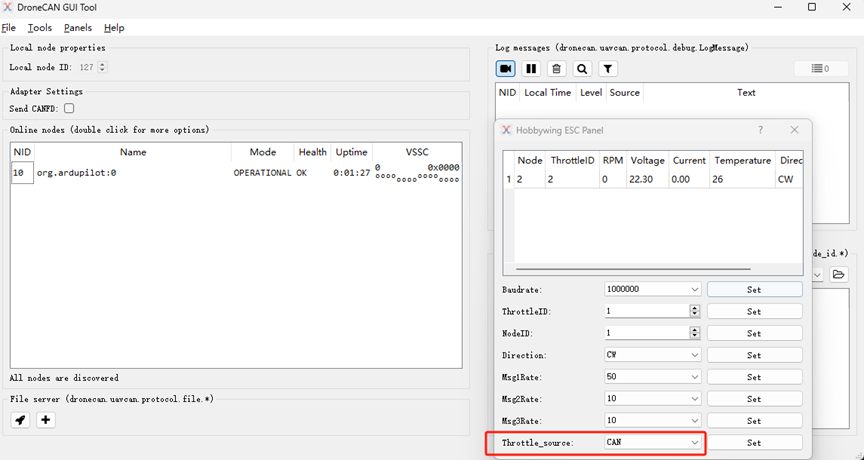
其他设置项:Msg1Rate(RPM 发送到飞控的速率), Msg2Rate(电压、电流温度)注意 Msg1Rate 必须大于 Msg2Rate,部分电调可设置使用只使用can或者pwm或者pwm和can同时使用。
设置好1个后断电,同样步骤设置其他的电调。
对每个电调重复以上步骤
所有电调的比特率设置成1000000后,需要将飞控的比特率恢复成默认10000000.
验证电机设置是否正确
接线:将所有电调同时连CAN接口,通电,pwm信号不接飞控,连接上地面站
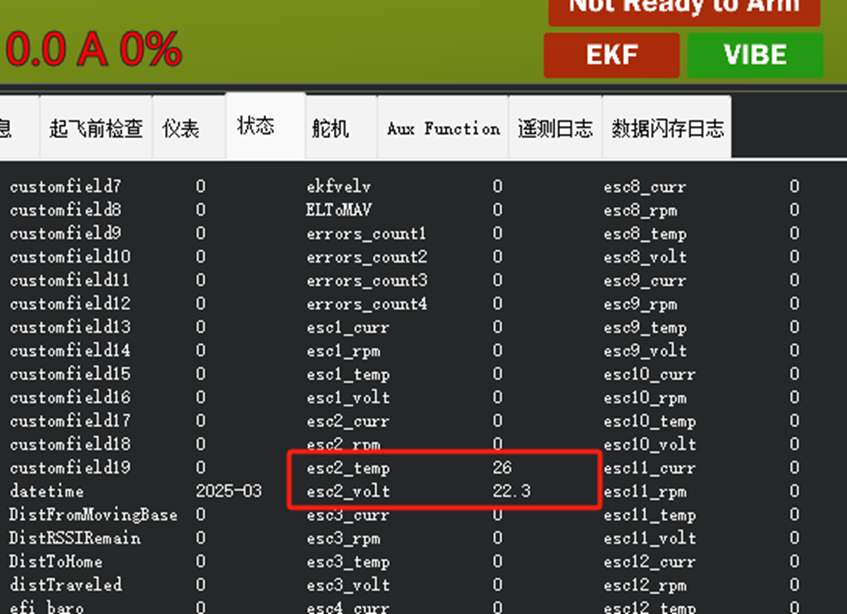
- 状态里查看电调信息是否正常显示
- 可选硬件的电机测试界面,检查电机转向、检查电机顺序。
- 如果pwm和can信号同时控制的,需要拔掉can信号单独测PWM控制电机。
- 认证其中一路断开反馈:在电机转动的情况下将pwm拔掉看电机是否会停转或者卡顿,测试备份的有效性。
用电调电压作为电池电压
作用:解决电调电压较大,又没有合适的电流计问题。
接线:将1号电机的CAN线连接X6飞控的CAN1接口。
配置飞控参数
Serial8_protocol设置为22
CAN_P1_DRIVER设置为 1 (First Driver)
CAN_D1_PROTOCOL设置为 1 (DroneCAN)
CAN_P1_BITRATE设置500000 (电调出厂时的波特率是500000,飞控的波特率是1,000,000,需要将飞控的波特率改成和电调一致,相同波特率的can外设可并联一个接口)
CAN_D1_UC_OPTION 设置为128,勾选“HobbywingESC”
BATT_MONITOR设置为9(esc)
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)