传统直升机——倾斜盘设置
倾斜盘的设计目的是接收基于飞行员俯仰、横滚和总距指令的舵机输入,并将其转换为单个桨叶的变距输入。三舵机和四舵机倾斜盘有多种不同的舵机布置方式。倾斜盘库涵盖了三舵机和四舵机倾斜盘的所有常见配置。如果你的倾斜盘较为特殊,也可以使用通用三舵机倾斜盘。
线性化舵机(Linearize Servo)功能适用于三舵机和四舵机倾斜盘。不过对于三舵机倾斜盘,该功能是可选的,因为其不存在卡滞风险。而四舵机倾斜盘由于四点连接可能产生卡滞,因此几乎总是需要启用该功能。
以下视频涵盖了倾斜盘的设置和水平校准操作。
该视频还介绍了最小总距、最大总距、零推力总距、最大周期变距以及稳定总距曲线的设置方法。
开始前准备
开始倾斜盘设置之前,请确保直升机的控制连杆已按照组装说明书安装完毕。为了准确测量桨叶变距,需通过在起落架下方添加垫片的方式,使旋翼轴垂直于地面
此外,如果尚未调整尾桨连杆(对于汽油发动机直升机,还包括油门连杆),在进行倾斜盘设置时可能会出现卡滞现象。这是因为 H_SV_MAN 功能提供的手动舵机设置会将舵机驱动至最小和最大行程值,其中包括尾桨舵机和受油门曲线设置影响的油门舵机。
选择倾斜盘类型
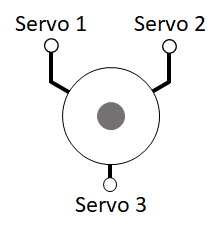
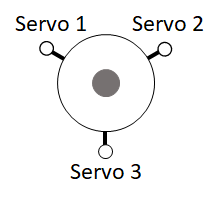
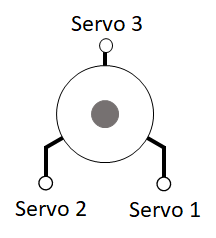
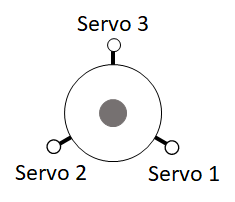
以下是通过 H_SW_TYPE 参数选择的倾斜盘类型。图示中标注了三舵机倾斜盘类型的舵机安装位置,分别为舵机 1、舵机 2 和舵机 3。这些位置也与自动驾驶仪上用于这些倾斜盘类型的 1 至 3 号舵机输出的默认输出功能相对应。
对于单直升机,分配给舵机 1 的功能为电机 33,舵机 2 为电机 34,舵机 3 为电机 35。对于双直升机机架,倾斜盘 1 的舵机功能分配与此相同。倾斜盘 2 默认使用 4、5、6 号舵机输出,分别分配电机 36、37 和 38。
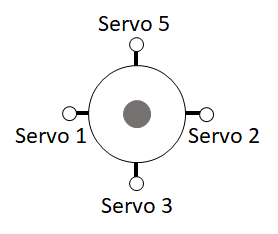
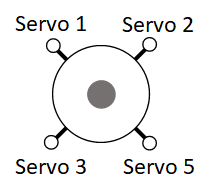
对于四舵机倾斜盘,单直升机机架上的第四个舵机(舵机 5)默认使用 5 号舵机输出,分配电机 37。对于双直升机机架,倾斜盘 1 的第四个舵机(舵机 7)默认使用 7 号舵机输出,分配电机 39;倾斜盘 2 的第四个舵机(舵机 8)默认使用 8 号舵机输出,分配电机 40。
⚠️ 注意
对于采用四舵机倾斜盘的双直升机机架,需将 RSCHeli 输出功能(电机 31)分配至除默认 8 号舵机输出以外的其他舵机输出。
倾斜盘类型说明
-
H3 通用型(H3 Generic):允许用户设置舵机位置和相位角,默认所有倾斜盘球头连杆到主轴的距离相同。
-
H1 非 CCPM 型(H1 non-CCPM):舵机 1 控制副翼,舵机 2 控制升降舵,舵机 3 控制总距。
-
H3-140 型:舵机 1、舵机 2、舵机 3 按特定位置布置(见原文图示)。
-
H3-120 型:舵机 1、舵机 2、舵机 3 按特定位置布置!
-
H4-90 型:舵机 1、舵机 2、舵机 3、舵机 5 按特定位置布置
-
H4-45 型:舵机 1、舵机 2、舵机 3、舵机 5 按特定位置布置
其他支持的倾斜盘类型
-
H3R-140 型:使用 H3-140 参数设置,可能需要反转 H_SW_COL_DIR 参数。
-
H3R-120 型:使用 H3-120 参数设置,可能需要反转 H_SW_COL_DIR 参数。
-
H3-90 型:使用 H4-90 参数设置,不使用其中一个舵机输出。
检查倾斜盘运动是否正常
使用遥控器检查倾斜盘对周期变距和总距输入的响应是否正常(请在 Stablize 模式下进行测试):
- 向前推升降舵摇杆,倾斜盘向前倾斜;向后拉升降舵摇杆,倾斜盘向后倾斜。
- 向右推副翼摇杆,倾斜盘向右倾斜;向左推副翼摇杆,倾斜盘向左倾斜。
- 向上推油门摇杆(总距控制),倾斜盘上升;向下拉油门摇杆(总距控制),倾斜盘下降。
通过设置 SERVO1_REVERSED、SERVO2_REVERSED、SERVO3_REVERSED 和 H_SW_COL_DIR 参数,确保倾斜盘能按上述描述对总距和周期变距输入做出正确响应。
倾斜盘水平校准
可使用专门设计的工具(保持倾斜盘与主轴垂直)或更经济的方法(使用磁铁和钉子,见下图)进行倾斜盘水平校准。使用磁铁和钉子的方法无需拆卸旋翼头即可完成校准。旋转主轴,使钉子穿过倾斜盘摇臂,通过以下方法之一调整倾斜盘,确保钉子能接触到每个倾斜盘摇臂的顶部。
(图示说明:钉子、磁铁的配合使用方式,见原文图示)
不启用线性化舵机功能时的水平校准
如果不启用线性化舵机功能,需通过舵机微调参数校准倾斜盘水平。将 H_SV_MAN 参数设置为 1,调整遥控器油门摇杆(总距),使舵机接近与主轴垂直。然后调整 SERVO1_TRIM、SERVO2_TRIM 和 SERVO3_TRIM 参数,直至倾斜盘水平。
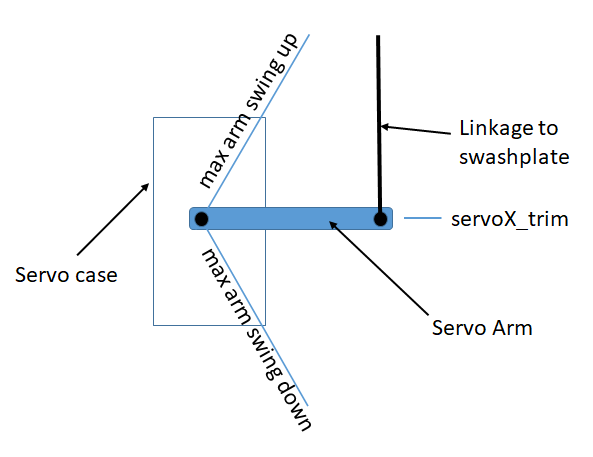
启用线性化舵机功能时的水平校准
如果打算启用线性化舵机功能,则需通过连接倾斜盘与舵机的变距连杆进行水平校准。首先,将舵机调整至行程中点,使舵机摇臂与变距连杆垂直(多数情况下也与主轴垂直)。如果舵机摇臂的花键无法使摇臂与主轴垂直,可通过舵机微调参数进行调整,尽量使微调值接近 1500。之后,调整变距连杆使倾斜盘水平。
总距设置
使用舵机手动设置功能(H_SV_MAN)将倾斜盘移动至最小和最大位置,在每个位置使用桨叶变距仪设置所需的桨叶变距。典型的总距范围为-2° 至+12°,完全特技飞行设置为-12° 至+12°。建议初始测试和正常自主飞行时使用较窄的范围。有关特技飞行设置的更多信息,请参阅《传统直升机特技飞行设置》。
- 将 H_SV_MAN 设置为 2,使倾斜盘移动至最大位置,调整 H_COL_MAX 参数,直至桨叶变距角达到所需的最大总距值。
- 将 H_SV_MAN 设置为 4,使倾斜盘移动至最小位置,调整 H_COL_MIN 参数,直至桨叶变距角达到所需的最小总距值。
注意
总距的整体测量必须使用 H_SV_MAN 参数,因为如果自动驾驶仪稳定功能处于激活状态,测量结果会受影响并变得不准确。
最小和最大总距角
H_COL_ANG_MAX 参数用于输入与 H_COL_MAX 对应的最大总距角(单位:度);H_COL_ANG_MIN 参数用于输入与 H_COL_MIN 对应的最小总距角(单位:度)。
零推力点
H_COL_ZERO_THRST 参数表示零推力对应的总距角(单位:度)。零推力总距用于设置总距与偏航的混合比例,对称桨叶的零推力总距角为 0°。将 H_SV_MAN 设置为 3,使倾斜盘移动至零推力位置,验证此时的桨叶变距角是否与 H_COL_ZERO_THRST 设置的值一致。
最小着陆总距
H_COL_LAND_MIN 参数用于设置垂直轴高度保持模式下的最小总距角(单位:度)。该参数可防止自动驾驶仪将总距驱动过低导致地面共振,同时也用于这些模式下的着陆检测。H_COL_LAND_MIN 的默认值为-2°,适用于配备对称桨叶的直升机,可保证合理的下降速度,同时避免在地面时总距过于负向。如果使用非对称桨叶,应将该参数设置为比零推力总距角低相应数值。例如,若 H_COL_ZERO_THRST 为-3°,则 H_COL_LAND_MIN 应设置为-5°。
注意
该参数的默认值已足够低,可防止大多数直升机在自主飞行过程中因误检测到着陆(例如悬停或着陆阶段遇到上升气流导致总距低于该参数值)而空中熄火。特技飞行直升机设置或使用非对称桨叶的直升机应考虑降低该数值。
自稳模式总距曲线
ArduPilot 为自稳模式(STABILIZE)提供了可编程总距曲线,可通过“柔化”曲线实现更平稳的飞行员控制。该曲线由 IM_STB_COL_x 系列参数设置(见下图),其他所有模式均使用上述设置的总距极值和直线曲线。
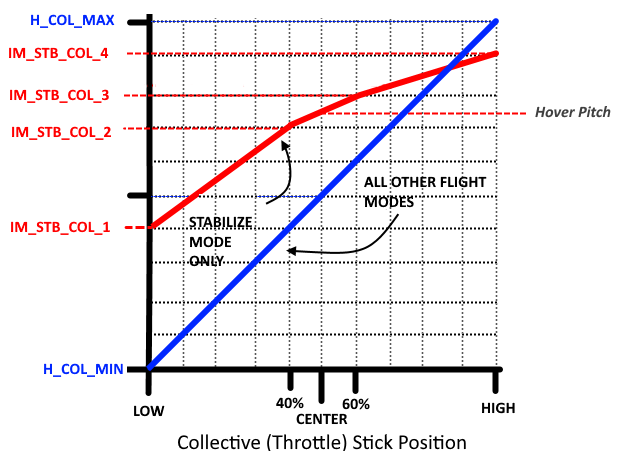
默认情况下,这些设置与完整的直线曲线一致,若总距范围设置为-2° 至+12°,则默认值如下表所示:
| 油门摇杆位置 | 变距角 |
|---|---|
| 低(Low) | -2° |
| 中(Center) | +3°(接近悬停常用的 4°) |
| 高(High) | +12° |
设置最大周期变距
H_CYC_MAX 参数用于设置最大周期变距角。测量最大周期变距时,需将桨叶旋转至与测量轴成 90° 的位置。例如,测量纵向最大周期变距时,需将桨叶旋转至与机身垂直(左右两侧伸出)。在升降舵和副翼摇杆居中时测量桨叶变距角,然后将升降舵摇杆推至最前或最后,再次测量桨叶变距角,两次测量的差值即为与 H_CYC_MAX 对应的最大周期变距角。俯仰(升降舵)轴和横滚(副翼)轴的周期变距角相同。
传统直升机倾斜盘设置核心参数对照表
| 参数名称 | 核心功能 | 关键设置说明 |
|---|---|---|
| H_SW_TYPE | 选择倾斜盘类型 | 涵盖 H3 通用型、H1 非 CCPM 型、H3-140/120 型、H4-90/45 型等,需匹配直升机舵机布置 |
| H_SV_MAN | 舵机手动控制 | 1=舵机中点位置,2=最大总距位置,3=零推力位置,4=最小总距位置,用于参数校准 |
| SERVO1/2/3_REVERSED | 舵机转向反转 | 调整倾斜盘对周期变距/总距输入的响应方向,确保运动符合操作逻辑 |
| H_SW_COL_DIR | 倾斜盘总距方向 | 部分反向安装的倾斜盘(如 H3R 系列)需通过该参数反转总距运动方向 |
| SERVO1/2/3_TRIM | 舵机微调 | 不启用线性化功能时,用于校准倾斜盘水平,使各摇臂高度一致 |
| H_COL_MAX | 最大总距行程 | 配合 H_SV_MAN=2,调整至所需最大桨叶变距角(如+12°) |
| H_COL_MIN | 最小总距行程 | 配合 H_SV_MAN=4,调整至所需最小桨叶变距角(如-2°) |
| H_COL_ANG_MAX | 最大总距角记录 | 输入 H_COL_MAX 对应的实际桨叶变距角(单位:度),供系统参考 |
| H_COL_ANG_MIN | 最小总距角记录 | 输入 H_COL_MIN 对应的实际桨叶变距角(单位:度),供系统参考 |
| H_COL_ZERO_THRST | 零推力总距角 | 对称桨叶默认 0°,配合 H_SV_MAN=3 验证,用于总距-偏航混合控制 |
| H_COL_LAND_MIN | 着陆最小总距 | 垂直高度保持模式下的总距下限,默认-2°,非对称桨叶需适配调整 |
| IM_STB_COL_1~4 | 稳定模式总距曲线 | 仅适用于 STABILIZE 模式,默认直线曲线,可柔化控制手感 |
| H_CYC_MAX | 最大周期变距角 | 设定俯仰/横滚轴的最大周期变距范围,需通过实际测量校准 |
倾斜盘设置操作步骤简表
| 操作阶段 | 核心任务 | 涉及参数/工具 | 具体操作步骤 |
|---|---|---|---|
| 前期准备 | 确保硬件合规 | 控制连杆、垫片、尾桨/油门连杆 | 1. 按组装说明书安装控制连杆;2. 用垫片调整起落架,使旋翼轴垂直地面;3. 预调尾桨(汽油机型含油门)连杆,避免卡滞 |
| 类型选择 | 匹配倾斜盘类型 | H_SW_TYPE | 1. 根据直升机舵机数量(3/4 舵机)和布置,选择对应类型(如 H3-140、H4-90);2. 双直升机机架需调整 RSCHeli 输出功能分配 |
| 运动验证 | 校准倾斜盘响应 | SERVO1/2/3_REVERSED、H_SW_COL_DIR | 1. 操作遥控器各摇杆,检查倾斜盘运动是否符合要求;2. 若响应反向,调整对应舵机反转参数或 H_SW_COL_DIR |
| 水平校准 | 确保倾斜盘水平 | H_SV_MAN、SERVO1/2/3_TRIM(非线性化)/ 变距连杆(线性化) | 1. 非线性化:H_SV_MAN=1,调油门摇杆至舵机近垂直,再微调 TRIM 参数;2. 线性化:舵机中点时摇臂垂直,通过变距连杆校准水平 |
| 总距设置 | 设定总距范围 | H_SV_MAN、H_COL_MAX、H_COL_MIN、H_COL_ANG_MAX/Min | 1. H_SV_MAN=2,调 H_COL_MAX 至目标最大变距角,记录至 H_COL_ANG_MAX;2. H_SV_MAN=4,调 H_COL_MIN 至目标最小变距角,记录至 H_COL_ANG_MIN |
| 零推力校准 | 确认零推力点 | H_COL_ZERO_THRST、H_SV_MAN | 1. H_SV_MAN=3,使倾斜盘处于零推力位置;2. 验证桨叶变距角与 H_COL_ZERO_THRST 设置一致(对称桨叶默认 0°) |
| 着陆总距设置 | 设定着陆总距下限 | H_COL_LAND_MIN | 1. 对称桨叶默认-2°;2. 非对称桨叶按“零推力角-2°”调整(如零推力角-3° 则设为-5°) |
| 周期变距设置 | 设定最大周期变距 | H_CYC_MAX | 1. 桨叶转至与测量轴垂直,记录摇杆居中时变距角;2. 推至摇杆极限,测量差值,调整 H_CYC_MAX 匹配该差值 |
| 稳定模式曲线(可选) | 优化稳定模式手感 | IM_STB_COL_1~4 | 默认直线曲线(对应-2°/+3°/+12°),可按需调整参数柔化曲线 |
参考文档 https://ardupilot.org/copter/docs/traditional-helicopter-swashplate-setup.html
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)