连接电机和电调--机架类型和电机序号
四轴机架(QUAD FRAMES)
包含四轴+、四轴X、四轴V、四轴H、四轴V尾、四轴A尾、反向四轴+、Betaflight四轴X、DJI四轴X、顺时针四轴X、无偏航扭矩四轴十字型、无偏航扭矩四轴X等类型,各类型均标注了电机编号、转向及对应字母标识。
 |
 |
 |
 |
|---|---|---|---|
 |
 |
注意事项
四轴A尾和V尾机架不使用前电机进行偏航控制(NYT)。
电机转向对基本运行并非至关重要,但如果前电机未以相反方向旋转,横滚和俯仰输入会导致反向偏航,从而降低偏航控制的动态范围。
 |
 |
 |
 |
|---|---|---|---|
 |
 |
无偏航扭矩(NYT)四轴机架主要适用于带有大型控制面的垂直起降尾座式配置。电机转向对这类机架无影响,但如果未按常规四轴机架的方式设置电机转向,横滚和俯仰输入会导致反向偏航,降低固定翼控制面的偏航控制动态范围。
 |
 |
|---|
六轴机架(HEXA FRAMES)
涵盖六轴plus、六轴X、六轴H、DJI六轴X、顺时针六轴X等类型,明确了各电机的编号、转向及对应字母。
 |
 |
 |
|---|---|---|
 |
 |
|
八轴机架(OCTO FRAMES)
包括八轴十字型、八轴X、八轴V、八轴H、DJI八轴X、顺时针八轴X、八轴I等类型,标注了电机的编号、转向及相关标识。
 |
 |
 |
 |
|---|---|---|---|
 |
 |
 |
四轴八旋翼机架(OCTO QUAD FRAMES)
包含八轴四旋翼十字型、八轴四旋翼X、八轴四旋翼V、八轴四旋翼H、Betaflight八轴四旋翼X、顺时针八轴四旋翼X、反向Betaflight八轴四旋翼X等类型,明确了电机配置细节。
 |
 |
 |
 |
|---|---|---|---|
 |
 |
 |
Y6机架(Y6 FRAMES)
涵盖Y6 A、Y6 B、Y6 F等类型,标注了各电机的转向和编号。
 |
 |
 |
|---|
三轴机架(TRICOPTER FRAMES)
包括常规三轴机架和俯仰反向三轴机架。
 |
 |
|---|
注意事项
由于尾舵(或机头舵机)用于偏航控制,电机转向对三轴机架的基本运行并非关键,但如果前电机未以相反方向旋转,横滚和俯仰输入会导致反向偏航,降低偏航控制的动态范围。
若尾舵(或机头舵机)响应偏航指令时方向错误,可将RCn_REVERSE(遥控器输入方向)或倾斜舵机的SERVOn_REVERSE参数设置为1(默认值为0),详情请参阅三轴机架设置页面。
双轴机架(BICOPTER FRAMES)
标注了左右电机的转向(左电机逆时针、右电机顺时针),并说明可根据需求反向设置电机转向(如左电机顺时针、右电机逆时针)。其中L代表左油门、左倾斜,R代表右油门、右倾斜。

十二六轴机架(DODECAHEXA FRAMES)
包含十二六轴十字型和十二六轴X类型,明确了电机的转向和编号。
 |
|
|---|
十轴机架(DECA FRAMES)
涵盖十轴十字型、十轴X(及顺时针十轴X)类型,标注了电机的转向和编号配置。
 |
 |
|---|
自定义机架(Custom Frames)
可通过Lua脚本配置最多支持12个电机的自定义机架类型。需计算每个电机的横滚、俯仰和偏航系数,并通过脚本加载。启用方式为将FRAME_CLASS参数设置为15(脚本矩阵模式),可参考四轴十字型示例和容错六轴示例。
测试电机旋转方向
完成遥控器和电调校准后,可按以下步骤检查电机旋转方向是否正确:
- 确保无人机上未安装螺旋桨。
- 打开发射器,将飞行模式开关设置为“自稳模式”(Stabilize)。
- 连接电池。
- 按住油门向下并向右打方向舵五秒,解锁无人机。
- 若解锁失败且电机不旋转,可能是未通过预解锁安全检查。
- 预解锁安全检查失败的标识为红色解锁灯双击后重复闪烁,需前往预解锁安全检查页面排查问题或禁用该检查后再继续。
- 成功解锁后,施加少量油门,观察并记录每个电机的旋转方向,应与所选机架示意图中的标注一致。
- 若电机旋转方向错误,可通过调换电调与电机之间三根电源线中的任意两根进行反向。
使用Mission Planner的电机测试功能检查电机序号
另一种检查电机连接是否正确的方法是使用Mission Planner初始设置菜单中的“电机测试”功能:
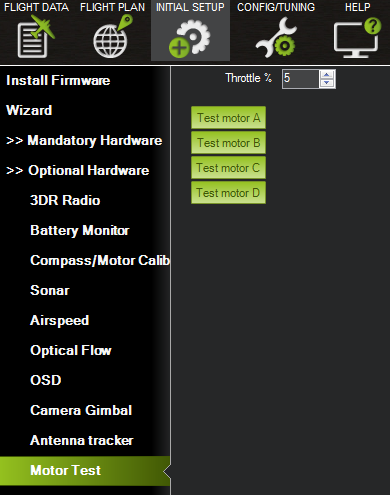
- 首先取下螺旋桨。
- 通过MAVLink连接设备后,点击对应绿色按钮,相应电机将转动五秒,按钮字母与电机编号的对应关系见下方示例。
- 若电机未转动,可将“油门百分比”调高至10%重试;若仍无效,可尝试调至15%。
- 四轴十字型配置中,第一个转动的电机位于正前方;四轴X配置中,第一个转动的电机位于正前方右侧,随后电机将按顺时针方向依次测试。
- X8机架将先启动上前右电机,然后是下前右电机,之后按相同模式循环;八轴V机架将先启动前右电机,然后按顺时针方向测试至前左电机。
常见问题排查
- 多数问题源于接线错误,务必连接信号线和接地线。
- 对于部分穿越机的四合一电调,通常需要接到9-12通道,并修改飞控的电调协议为Dshot300或其它。
参考文档:https://ardupilot.org/copter/docs/connect-escs-and-motors.html#connect-escs-and-motors
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)