请输入
菜单
X6飞控说明书
产品简介
X6飞控基于开源FMU v6X架构和Pixhawk自动驾驶总线开源规范打造,采用分离式飞控核心设计,适用于多种机型,具备高性能、多接口、高兼容性等特点。
下载资源
地面站下载
MissionPlanner地面站:https://firmware.ardupilot.org/Tools/MissionPlanner
QGC地面站:https://github.com/mavlink/qgroundcontrol/releases
固件下载
ArduPilot官方固件
官方下载地址:https://firmware.ardupilot.org/
PX4固件下载
- 下载地址:https://github.com/PX4/PX4-Autopilot/releases
- 说明:与APM不同,PX4固件所有机型集成在一个文件中
PX4刷写注意事项
您在使用QGC地面站升级固件的过程中,请勿勾选【高级】并点击【刷写ChibiOS Bootloader】,此操作会擦除飞控的Bootloader,造成无法识别SBUS信号等部分接口无法正常使用,需要返厂维修,由此产生的售后运费将由用户承担,请用户知悉!
具体请参考此刷写教程:PX4安装教程
硬件参数
核心参数
- 硬件标准:FMU v6X
- 主控制器(MCU):STM32H753IIK6,32位处理器,主频480MHz,2MB闪存,1MB内存
- IO控制器(IO MCU):STM32F103
- 内置减震:支持
- 工作电压:4.5V-5.4V
- 工作温度:-20℃~85℃
- 重量:93g
- 固件支持:ArduPilot 4.5.6及以上版本、PX4 1.16.1beta及以上版本
- 机型支持:直升机、多旋翼、固定翼、垂直起降固定翼、无人车、无人船、潜水器、飞艇
传感器配置
- 惯性测量单元(IMU):3个同步IMU,搭载BalancedGyro技术,低噪声且抗冲击性更强
- IMU1:ICM45686(带减震)
- IMU2:BMI088(带减震)
- IMU3:ICM45686(无减震)
- 特性:IMU恒温加热(加热功率5W)、内置减震
- 气压计:2个ICP-20100
- 磁罗盘:内置工业级RM3100芯片
- 模拟输入:2路模拟输入
- ADC Pin12 → 6.6V感应
- ADC Pin13 → 3.3V感应
- RSSI输入引脚 = 103
输出特性
- PWM数量:16路(14路杜邦接口+2路GH1.25扩展接口)
- PWM电平切换:支持3.3V与5V之间切换
- PWM输出分组:
- 前8路输出(M1-M8):由专用STM32F103 IO控制器控制,支持所有PWM输出格式,不支持DShot
- 分组方式:1-2路为一组,3-4路为一组,5-8路为一组
- 后8路输出(M9-M16):直接连接STM32H753 FMU控制器,支持所有PWM输出格式
- 分组方式:1-4路为一组,5-6路为一组,7-8路为一组
- 特性:除M15-M16外,均支持DShot;同组通道需使用相同输出速率,若组内任一通道使用DShot,组内所有通道均需使用DShot
- 前8路输出(M1-M8):由专用STM32F103 IO控制器控制,支持所有PWM输出格式,不支持DShot
- GPIO功能:所有PWM输出可作为GPIO使用(如继电器、相机、转速计等),需将输出的SERVOx_FUNCTION设置为-1
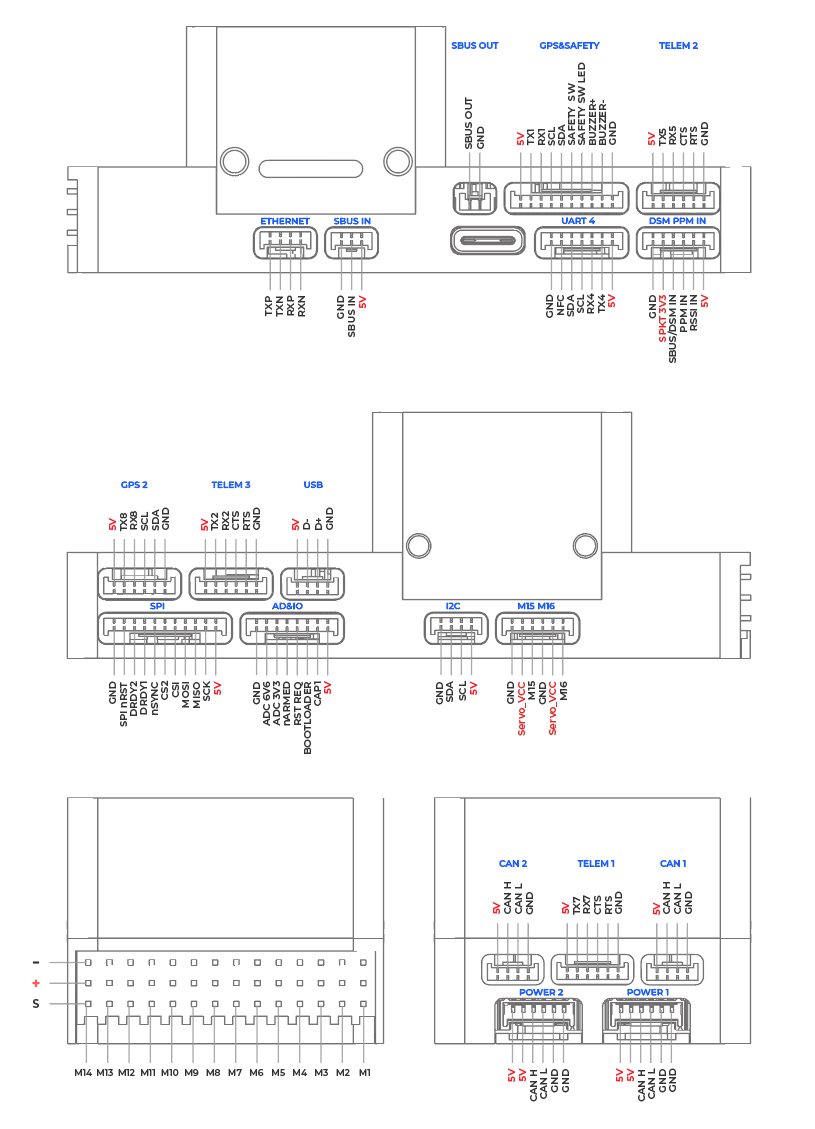
接口定义
UART映射关系
引脚图中UART标记为Rn和Tn,Rn为UARTn的接收引脚,Tn为UARTn的发送引脚。
| 名字 | 功能 | MCU引脚 | DMA |
|---|---|---|---|
| SERIAL0 | OTG1 | USB | - |
| SERIAL1 | Telem1 | UART7 | 已启用 |
| SERIAL2 | Telem2 | UART5 | 已启用 |
| SERIAL3 | GPS1 | USART1 | 已启用 |
| SERIAL4 | GPS2 | UART8 | 已启用 |
| SERIAL5 | Telem3 | USART2 | 已启用 |
| SERIAL6 | UART4 | UART4 | 已启用 |
| SERIAL7 | DEBUG | USART3 | 已启用 |
| SERIAL8 | OTG-SLCAN | USB | - |
接口明细及功能
| 接口名称 | 功能描述 |
|---|---|
| Power 1~2 | 连接OnePMU或其他DroneCAN总线电流计 |
| GPS&Safety | 可连接PX4标准类型GPS,集成安全开关、罗盘、蜂鸣器和LED灯 |
| GPS 2 | GPS接口,可连接GPS或RTK,集成I2C总线引脚(对应SERIAL4) |
| TELEM1~3 | 连接OneDLink、OneVDLink通信链路或其他MavLink设备,也可连接其他串口通信设备(TELEM1对应SERIAL1,TELEM2对应SERIAL2,TELEM3对应SERIAL5) |
| CAN1~2 | 连接DroneCAN/UAVCAN设备(如OneGNSS、OneASP、OneRTK等) |
| SBUS IN | 连接SBUS遥控接收机 |
| SBUS OUT | SBUS信号输出,用于吊舱控制等支持SBUS控制的外设 |
| DSM PPM IN | 集成DSM与PPM遥控接收机接口,及RSSI信号强度输入 |
| M1-M16 | 支持PWM输出,可连接PWM电调、舵机、相机快门/热靴等(M15-M16通过配备线缆扩展;M1-M14支持Dshot协议,M9-M14支持双向Dshot) |
| Type C | 连接电脑,用于飞控配置、固件刷写等 |
| USB | GH1.25 USB扩展接口 |
| I2C | 连接I2C设备(如I2C空速计) |
| TF内存卡槽 | 安装存储日志的内存卡,最大支持256G,建议格式为FAT32 |
| ETHERNET | 以太网接口,连接支持网口通信的设备(如网口吊舱、树莓派、英伟达Jetson系列板卡等) |
| AD&IO | 集成BootLoader接口、数模转换器,可连接模拟电流计 |
| SPI | 连接外部SPI传感器 |
| IO Debug | 专业人员和开发者使用,连接需打开下盖 |
| FMU Debug | 专业人员和开发者使用,连接需打开下盖 |
电源接口
- 配置:2路六针电源接口,支持CAN接口供电
- 特性:固件中默认配置,无需额外调整
- 伺服电压监测:9.9V
遥控输入
- 支持协议:SBUS、DSM、PPM及所有单向遥控协议
- 连接接口:SBUS RC IN接口或DSM/PPM RC接口
PWM电平切换
- 默认状态:飞控默认输出3.3V电平电压
- 切换场景:设备信号连接线缆超过75cm时,建议修改为5.0V电平电压(需确保外设支持该电压,建议联系硬件设备厂家咨询)
- 切换方法:连接Mission Planner后,在全部参数表里搜索BRD_PWM_VOLT_SEL参数,默认值0代表3.3V电平,修改为1后写入参数,重启飞控/重新上电后生效
PWM接头推荐
X6飞控上PWM端子为定制2.6mm间距,推荐使用Futaba 3pin杜邦正角插头。

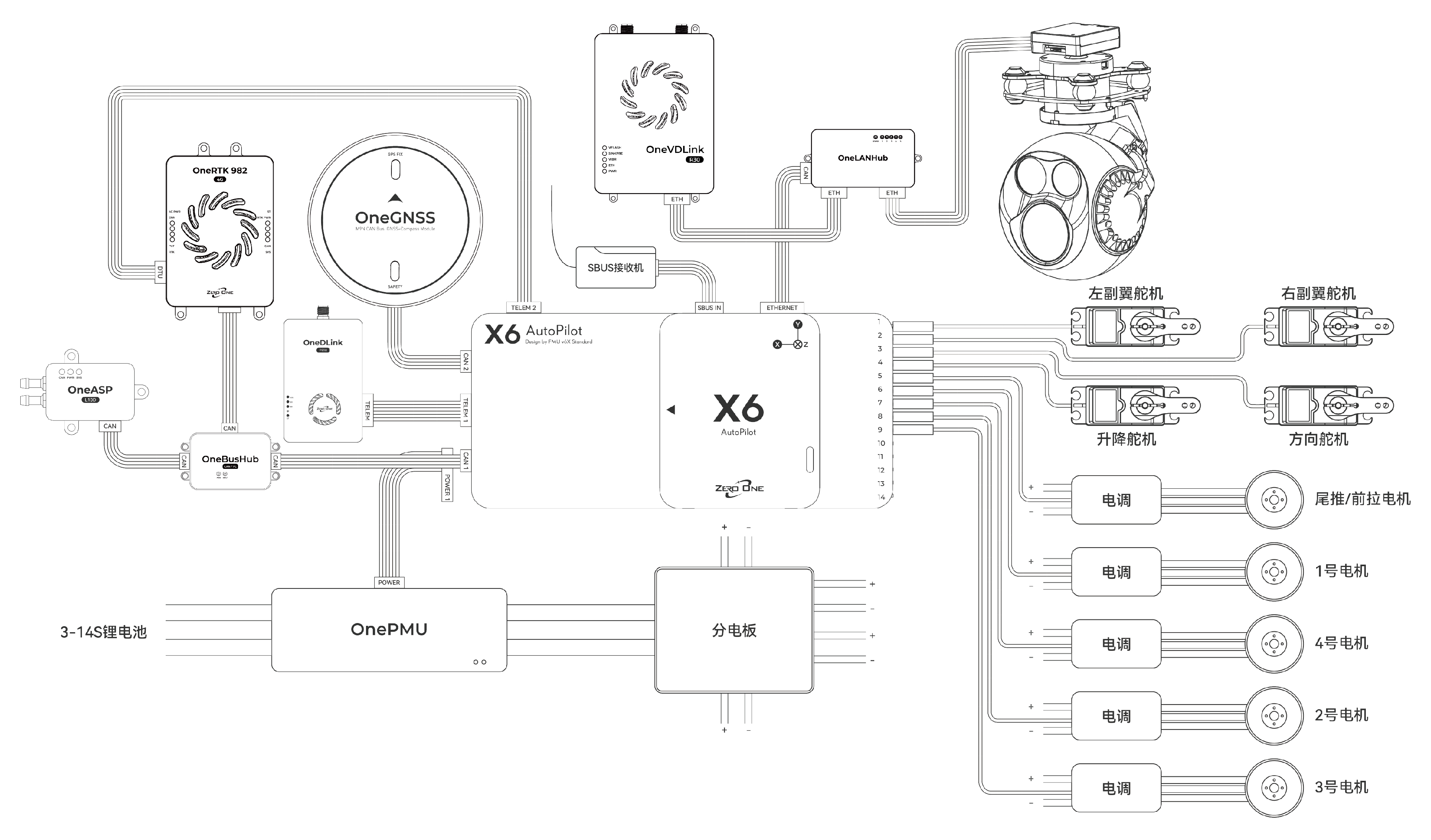
接线说明
常规垂直起降无人机的接线方式仅供参考,用户需根据自身机型和需求自行添加设备,调整接口方式,各接口的作用可参考前文接口说明。
飞控尺寸与安装孔位
安全须知
- 产品不适用于未满18周岁人群,未成年人需在成人监护下使用
- 本产品为开源飞控,使用人员需具备专业的开源无人机知识,能正确配置与操作无人机
- 请勿在大风、雨天环境下飞行(飞控本身不具备防雨能力)
- 遵守当地法律法规,未获得当地许可,切勿在人群密集区域、火车站、机场或其他敏感区域飞行,避免危害公共安全
- 起飞前必须仔细检查,确保所有连接稳固、设备工作正常、控制动作响应正确,防止意外发生
- 每次飞行前后需进行例行维护,检查硬件连接是否松动、电机桨叶是否损坏、螺丝紧固状态等
- 高速旋转的螺旋桨具有较大杀伤力,飞行时需远离人群
- 切勿在饮酒、疲劳或其他精神状态不佳的情况下进行任何操作与飞行
上一个
X6飞控
下一个
X6 Air飞控系列
最近修改: 2026-07-10Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲