PX4自动调参完整教程
一、调参背景与核心原理
PX4飞控系统通过PID控制器(涵盖速率、姿态、速度、位置四大维度)计算输出信号,实现无人机从当前状态到目标设定点的精准控制。其中,速率控制器与姿态控制器的调参质量直接决定飞行稳定性——调参不当会导致无人机抗干扰能力弱、响应迟缓,甚至出现振荡等安全隐患;而速度与位置控制器受机身动力学影响较小,同类型机架的默认参数通常可满足基础飞行需求,无需优先调参。
自动调参功能的核心原理是:飞控系统在各轴施加微小扰动,通过监测无人机的动态响应,自动计算并优化速率与姿态控制器的PID参数。该功能适用于固定翼、多旋翼、垂直起降固定翼无人机,理论上支持所有带速率控制器的机型(目前仅官方明确支持上述三类)。
若你的无人机已选择匹配的机架类型,通常可实现基础飞行,但想要达到更稳定的飞行效果,仍需根据实际硬件配置完成速率与姿态控制器的调参(仅需执行一次,机架结构变更后需重新调参)。
二、前期准备:确保满足调参前提
自动调参的核心前提是:无人机已具备稳定飞行能力,能应对中度外界干扰。请按以下步骤完成准备与验证:
(一)基础准备
- 完成常规飞行前安全检查,确保飞行场地开阔无遮挡、无人员密集区域;
- 选择无风或微风天气(风速过大会干扰调参精度);
- 提前配置中止机制:可通过切换飞行模式,或设置专属按键/开关,用于紧急中止自动调参;
- 确认无人机已选择匹配的机架类型(机身设置阶段完成),且能在位置控制模式下安全飞行。
(二)调参资格验证流程
- 起飞并进入对应悬停/飞行状态:
- 多旋翼:切换至高度模式或稳定模式,起飞后悬停在离地1米处;
- 固定翼:切换至位置模式或高度模式,以巡航速度完成起飞并保持平稳飞行。
- 执行稳定性测试(以横滚轴为例):
操作遥控器摇杆,使无人机向左倾斜→向右倾斜→摇杆回中(全程约3秒),观察无人机是否能在2次振荡内自行稳定; - 逐步加大倾斜幅度重复测试,当倾斜角度达到约20度时,无人机仍能在2次振荡内稳定,则横滚轴满足要求;
- 对俯仰轴执行相同测试,若同样满足稳定条件,即可启动自动调参;
- 若未达到要求:需先参考「故障排除」部分的手动调参方法,调整至满足条件后再进行自动调参。
三、自动调参步骤
自动调参需在足够开阔的安全飞行区内执行,推荐无风或微风环境,全程用时约40秒(实际介于19-68秒之间)。多旋翼推荐使用高度模式(althold),固定翼推荐使用保持模式,也可选用其他飞行模式,调参过程中遥控器仍可直接控制无人机,可随时中止操作。
参考视频(外网需VPN):https://www.youtube.com/watch?v=5xswOhhqrIQ
注解:通过切换飞行模式或使用已配置的自动调参启用/禁用开关,可随时中止调参流程。
具体操作步骤
- 起飞并进入测试准备状态:
- 多旋翼:通过遥控器在高度模式下起飞,悬停在离地4-20米的安全高度,保持周围无障碍物;
- 固定翼:以巡航速度飞行后,切换至保持模式,飞机将以恒定高度和速度绕圈飞行。
- 启用自动调参功能:
打开QGroundControl地面站,依次进入菜单:无人机设置 > PID调节
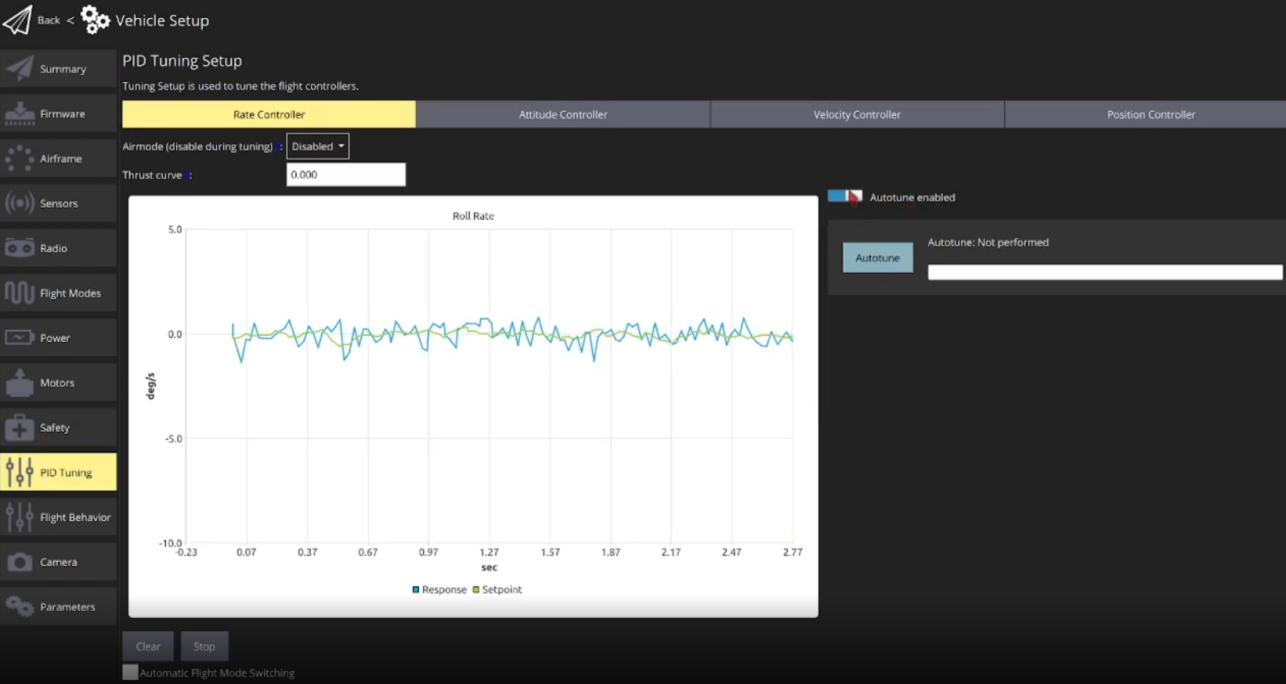
- 启动调参流程:
- 选择「速率控制器」或「姿态控制器」选项卡(默认Autotune为启用状态,关闭则显示手动调参界面);
- 点击【Autotune】按钮,弹出调参启动提示框(含注意事项),点击「确定」开始自动调参。
- 观察调参过程:
无人机将先执行快速滚转运动,随后依次进行俯仰、偏航运动,调参进度将通过【Autotune】按钮旁的进度条实时显示,进度条满格即表示调参完成。 - 参数应用与保存:
- 多旋翼:地面站将提示「降落并解锁以保存参数」,通过遥控器控制无人机降落、上锁后,地面站显示「autotune successful」,自动调参的PID参数将正式生效(点击【Autotune enable】可查看具体PID数值);
- 固定翼:调参完成后将立即自动应用新参数,并在空中进行4秒测试;若检测到飞行不稳定,将自动恢复原参数;测试正常则新参数直接生效。
- 调参后验证:
自动调参后的外环P值通常较大,建议适当降低后再起飞测试。按前期准备中的稳定性测试流程,手动验证无人机飞行状态:若出现强烈振荡,需立即着陆,参考「故障排除」部分处理。
四、特殊机型与模式说明
- 垂直起降固定翼:需分两次调参——在MC模式(旋翼模式)下按多旋翼流程调参,在FW模式(固定翼模式)下按固定翼流程调参;
- 多旋翼:若已知无人机在起飞模式(takeoff)和位置模式下稳定,可直接在起飞模式起飞,切换至位置模式进行调参;
- 固定翼:自动调参也可在高度模式或位置模式下执行,但直线飞行时需更大安全区域,且调参效果无明显提升;可通过参数配置选择在空中或着陆后应用调参结果。
五、故障排除
1. 自动调参前无人机出现振荡
- 慢速振荡(每秒1次或更慢):常见于大型无人机,因姿态回路比速率回路响应过快导致;
- 多旋翼:将MC_ROLL_P和MC_PITCH_P参数各降低1.0步;
- 固定翼:将FW_R_TC、FW_P_TC和FW_Y_TC参数各增加0.1步。
- 快速振荡(每秒超过1次):因速率环路增益过高导致;
- 多旋翼:将MC_[ROLL|PITCH|YAW]RATE_K参数各降低0.02步;
- 固定翼:将FW_RR_R、FW_RR_P和FW_RR_Y参数各减小0.01步。
2. 自动调参失败
若调参过程中无人机移动幅度不足,系统无法识别动力学特性并计算参数,需将FW_AT_SYSID_AMP(固定翼)、MC_AT_SYSID_AMP(多旋翼)参数各增加1步,重新启动自动调参。
3. 自动调参后无人机振荡
因延迟、饱和、机身灵活性等未纳入数学模型的因素,可能导致环路增益过高。按「调参前振荡」的对应步骤调整参数即可。
4. 调参后飞行仍不稳定
建议参考官方手动调参指南进一步优化:
六、可选设置(自定义调参规则)
1. 参数应用时机配置
默认情况下,多旋翼在着陆上锁后应用调参结果,固定翼在空中即时应用并测试。可通过以下参数自定义配置:
- 多旋翼:MC_AT_APPLY参数
- 固定翼:FW_AT_APPLY参数
- 0:不应用新增益(仅用于测试调参算法结果);
- 1:解锁后应用(多旋翼默认),可在下次起飞时测试新参数;
- 2:即时应用(固定翼默认),应用后4秒内监测稳定性,不稳定则自动恢复原参数。
2. 遥控器开关控制自动调参(固定翼专属)
可通过RC AUX通道配置遥控器开关,实现任意模式下启用/禁用自动调参,配置步骤如下:
- 选择一个RC通道作为自动调参启用/禁用开关;
- 将RC_MAP_AUX1(或RC_MAP_AUX2-RC_MAP_AUX6)参数设置为该通道;
- 将FW_AT_MAN_AUX参数设置为所选通道(例:映射RC_MAP_AUX1则设为1:AUX 1);
- 开关逻辑:通道值低于0.5(范围[-1,1])时禁用调参,高于0.5时启用;
- 注意:使用该开关启用调参前,需提前选择好调参轴。
3. 调参轴选择(固定翼专属)
通过FW_AT_axes位掩码参数选择需要调参的轴(默认全选):
- 位0:横滚轴(默认启用);
- 位1:俯仰轴(默认启用);
- 位2:偏航轴。
七、常见问题解答
1. 自动调参是否适用于所有支持的机身?
自动调参基于线性系统(SISO,轴间无耦合)的数学模型设计,且假设模型复杂度有限(2个极点和2个零点)。若无人机实际特性与该假设偏差过大,模型无法准确反映其动力学特性,自动调参效果会受影响。
2. 自动调参需要多长时间?
调参时长由单轴调参时间、轴间暂停时间、空中测试时间决定(默认配置下):
- 单轴调参:5-20秒(20秒内未完成则中止);
- 轴间暂停:每两轴之间暂停2秒;
- 空中测试:若空中应用参数,需额外4秒测试时间。
- 多旋翼(默认不空中测试):19-64秒(3个轴:5×3 + 2×2 至 20×3 + 2×2);
- 固定翼(默认空中测试):25-70秒(3个轴:5×3 + 2×3 + 4 至 20×3 + 2×3 + 4)。
注:可通过参数配置调整是否空中测试、调参轴数量,进而改变调参时长。
3. 如何通过日志分析无人机状态?
人眼难以识别高频震动等问题,可通过PX4日志工具分析,具体操作参考官网指南:https://docs.px4.io/main/zh/log/flight_review.html
参考来源:https://docs.px4.io/main/zh/config/autotune_mc#drone-oscillates-when-performing-the-pre-tuning-test
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)