请输入
菜单
OneASP Pro空速计&气压计产品手册
产品介绍
- 24位模数转换器,对偏移,灵敏度,温度影响非线性度进行校准和温度补偿。
- 最大测量空速439.9km/h,满足从低速到亚音速的无人机的空速测量需求。
- 采用DroneCAN总线通信,传输距离远,抗干扰性强。
- 采用旋钮锁紧结构,硅胶管不松脱
产品参数表
| 参数项 | 参数值 |
|---|---|
| 空速测量范围 | 0~439.9km/h(122.2m/s)(@15℃ 101325Pa标准大气条件) |
| 气压计 | 有 |
| 总误差带 | ±0.15%FS |
| 温漂性能 | 温漂小,精度高 |
| 硅胶管锁止结构 | 有 |
| 接口类别 | 车规级04R-JWPF-VSLE-S |
| 通信协议 | DroneCAN总线通信,抗干扰能力强 |
| 飞控兼容 | ArduPilot与PX4飞控 |
| 工作电压 | 4.7-5.3V |
| 工作温度 | -20℃~85℃ |
| 外壳材料 | 航空铝外壳 |
| 重量 | 40g |
| 尺寸 | 78.6×39×15mm |
ArduPilot空速计启用与校准教程
CAN接口配置
运行MissionPlanner并进入【Config】>【FULL Parameter List】(全部参数表)界面,设置以下参数后保存,并重启飞控。
连接至飞控CAN1接口时:
CAN_P1_DRIVER = 1CAN_D1_PROTOCOL = 1
连接至飞控CAN2接口时:
CAN_P2_DRIVER = 1CAN_D2_PROTOCOL = 1
空速传感器设置
ARSPD_TYPE = 8(设置为UAVCAN类型)ARSPD_USE = 1(启用空速计)
空速置零(偏移校准)
⚠️ 提示
OneASP Ultra在一般环境中具有一致性优势,可通过设置ARSPD_SKIP_CAL = 1跳过此步骤。
手动置零步骤
- 连接Mission Planner与飞控
- 将空速计置于无风环境
- 进入【飞行数据】→【动作】标签页
- 在第一复选框选择 "Preflight Calibration"
- 点击 "执行动作" 按钮

飞行前检查
-
静态检查:无风状态下,空速值应在 0~3m/s 范围内跳动

超出范围需重新进行空速置零 -
动态检查:用手托住空速管并吹气,确认空速数值随气流变化
空速自动校准
设置参数
ARSPD_AUTOCAL = 1(开启自动校准)
校准方法(二选一)
方法一:FBWA模式校准
- 以
QStabilize或QLoiter模式起飞 - 转换为
FBWA(自稳A模式) - 控制无人机盘旋飞行5圈左右
- 等待地面站消息栏提示"校准完成"
- 着陆后将
ARSPD_AUTOCAL设为0
方法二:Loiter模式校准(适合新手)
⚠️ 注意:勿在风速较大环境下操作
- 设置参数:
ARSPD_USE=1和ARSPD_TYPE=8 - 起飞后使用
Loiter模式盘旋5圈左右 - 等待校准完成提示后降落
- 将
ARSPD_AUTOCAL设为0
PX4固件空速计配置与校准教程
硬件连接
将OneASP L10D空速计连接至飞控的 CAN1/CAN2 接口。
参数设置
飞控刷入PX4固件后,连接QGC地面站,在参数表中设置以下参数:
- UAVCAN_ENABLE → 设置为
Sensors automatic Config - UAVCAN_SUB_ASPD → 设置为
enable - UAVCAN_SUB_DPRES → 设置为
enable
重启与注意事项
设置完成后重启飞控。
⚠️ 重要提示:飞控必须安装内存卡才能正常使用空速计功能。
双空速计冗余配置
当无人机安装两个空速计时,可通过参数配置数据切换策略:
- ASPD_PRIMARY → 配置主空速计数据源
工作原理:
- 飞控优先检测主空速计数据是否正常
- 当主空速计数据异常或未通过检测时,自动切换至副空速计
- 确保空速数据可靠性,提升飞行安全性
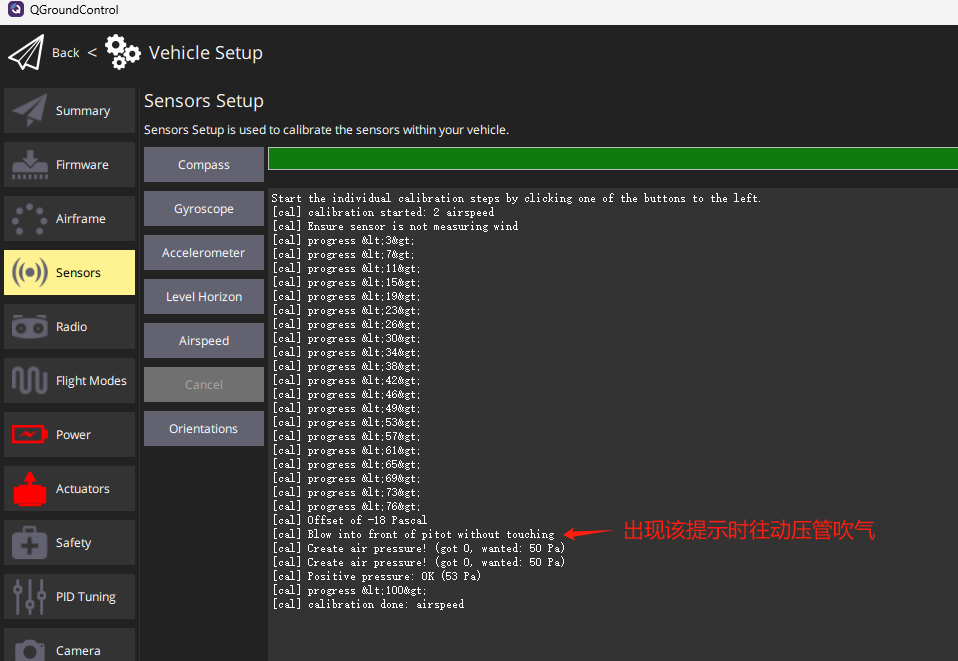
空速校准流程
在QGC地面站中按以下步骤操作:
校准步骤
- 进入 Vehicle Setup → Sensors → 选择 空速
- 单击空速传感器按钮开始校准
- 保护传感器不受风吹(用手捂住空速管),注意不要堵塞任何孔
- 单击"确定"开始校准
- 等待提示 "blow into front of probe without touching"
- 向皮托管前部吹气,提示显示
process <100> - 等待提示校准完成
上一个
OneASP Pro空速计&气压计
下一个
OneASP系列空速计推荐选型表
最近修改: 2025-12-30Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲