请输入
菜单
OneRadar RA15雷达用户手册
产品使用注意事项
- 安装时雷达需远离电机、悬空金属壳体这类电磁干扰源。
- 该雷达的固件仅支持ArduPliot固件版本为4.5.0及以上。
- 飞行控制器,它的闪存需要在2Mb及以上,支持烧写ArduPliot固件。
- 雷达在使用过程中请保持雷达天线面朝下方无其他遮挡物。
- 在开阔、无干扰雷达信号的地方进行使用和测试。
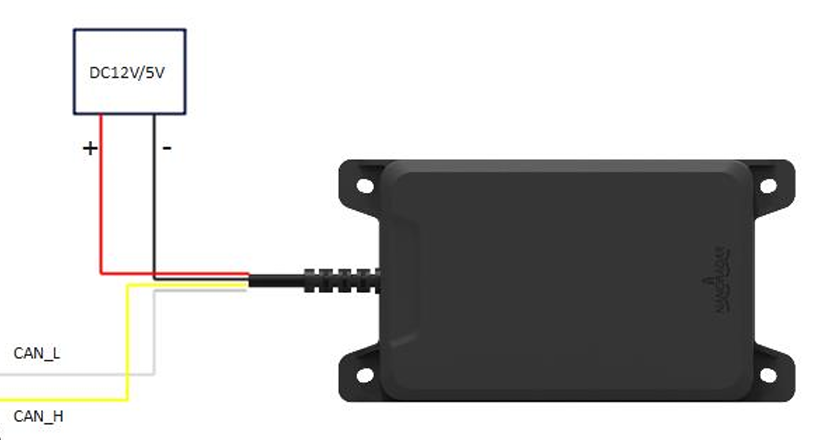
- 雷达输入电压范围5~12V DC,纹波小于20mv。不干净的电源会导致算法分析时频谱上出现若干固定的干扰频率成份,影响测试效果,会在某固定距离上持续输出一个目标。
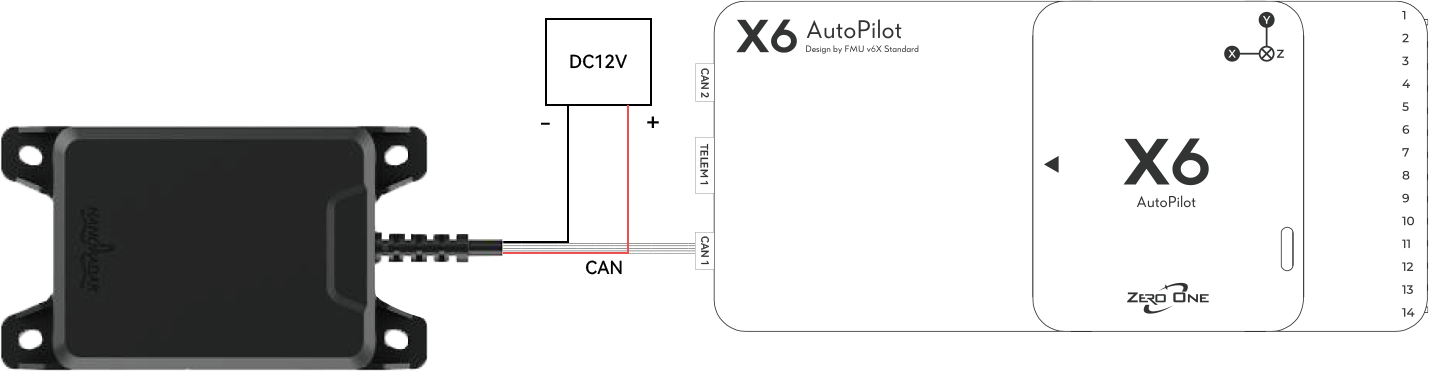
飞控与雷达接线示意
- 使用螺丝将雷达和固定架固定。
- 定高安装:使用螺丝将雷达和固定架安装在无人机下方底座。
- 天线面朝下,出线在无人机左前方。
雷达接口定义
雷达飞控接线示意
地面站参数设置(ArduPilot)
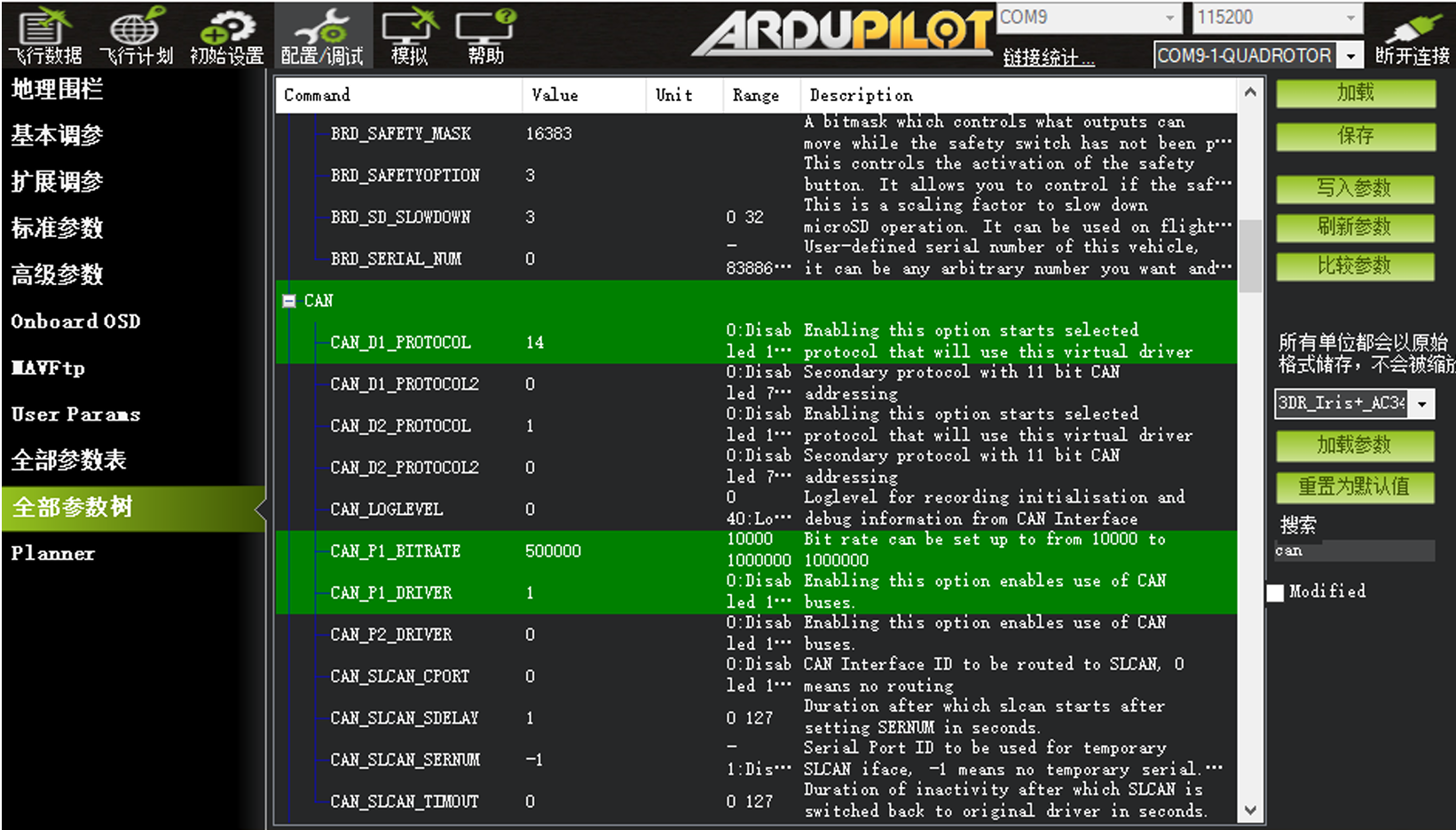
CAN接口参数设置
| 参数名 | 值 | 描述 |
|---|---|---|
| CAN_D1_PROTOCOL | 14 | 允许在CAN1端口上使用NRA24CAN通信协议 |
| CAN_P1_DRIVER | 1 | 开启CAN1总线 |
| CAN_P1_BITRATE | 500000 | CAN1接口码率为500kb/s |
在配置CAN参数时,需要先修改PROTOCOL和DRIVER,然后写入参数并刷新才能配置BITRATE参数;如需使用CAN2,可将上述参数中的“D1”、“P1”改为“D2”、“P2”,例如“CAN_D1_PROTOCOL”改为“CAN_D2_PROTOCOL”。
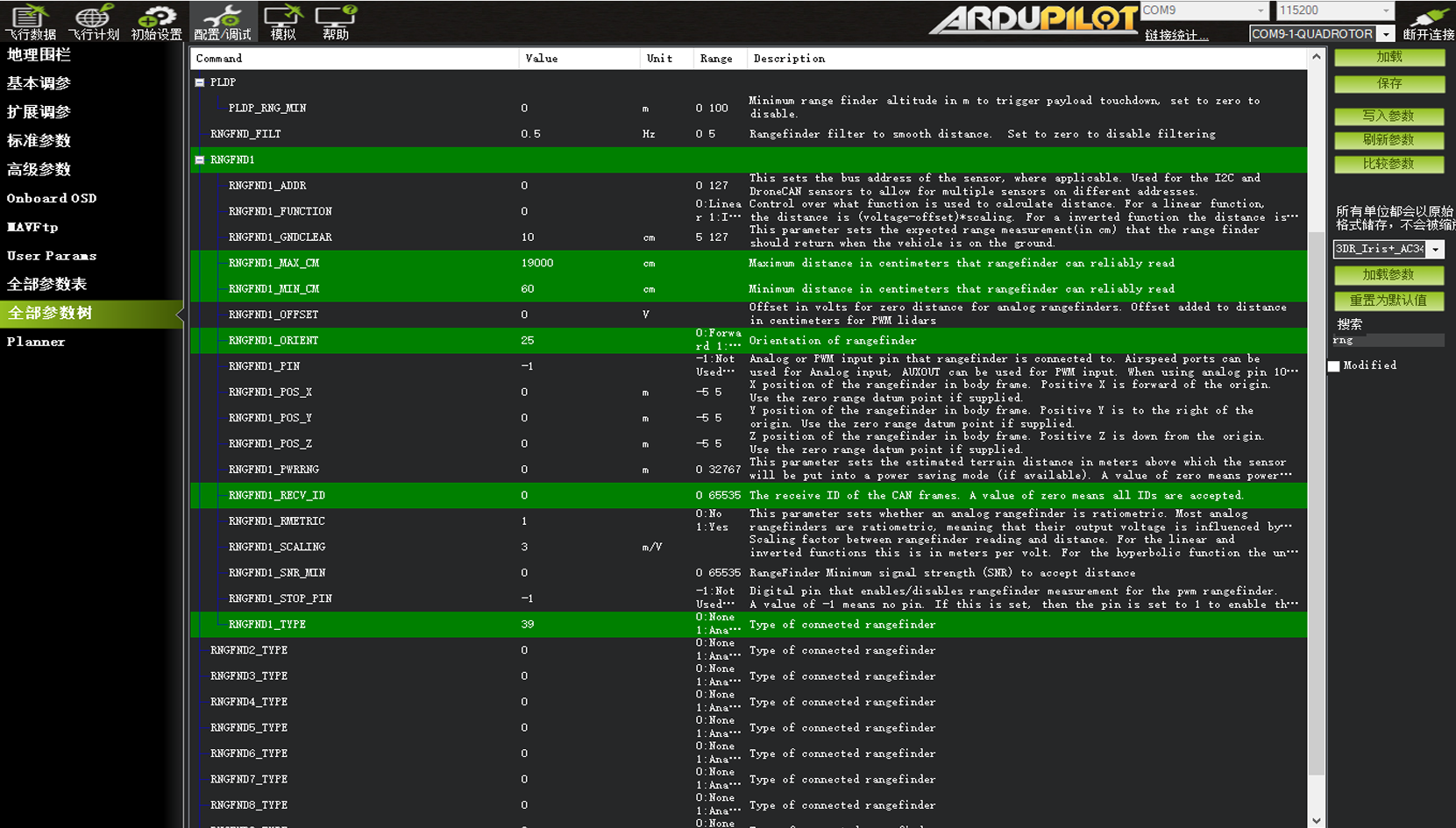
定高传感器配置
| 参数名称 | 值 | 参数介绍 |
|---|---|---|
| RNGFND1_TYPE | 39 | 使能NRA24测距传感器 |
| RNGFND1_RECV_ID | 0 | 允许接收的雷达id为0 |
| RNGFND1_MAX_CM | 19000 | 最远的测试距离,设置为0则雷达为默认值 |
| RNGFND1_MIN_CM | 60 | 最近的测试距离,设置为0则雷达为默认值 |
| RNGFND1_ORIENT | 25 | 设置传感器的探测方向朝下 |
上述参数值仅供参考,实际可根据客户的要求自行作出修改。 修改RNGFND1_MAX_CM和RNGFND1_MIN_CM不能限制雷达的测量距离。
定高调试
点击飞行数据主界面中最下方“调试”,打开一个测距数据实时界面
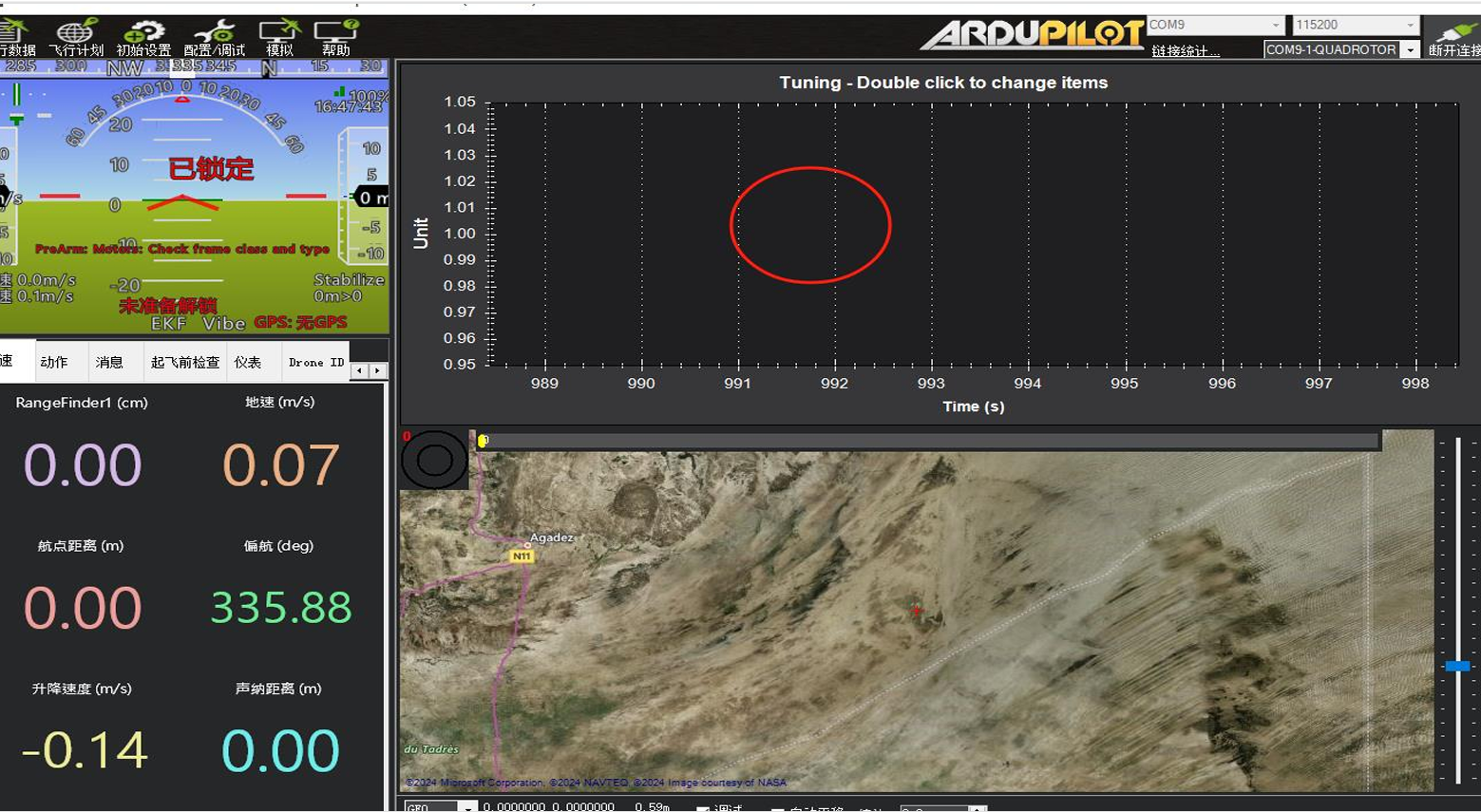
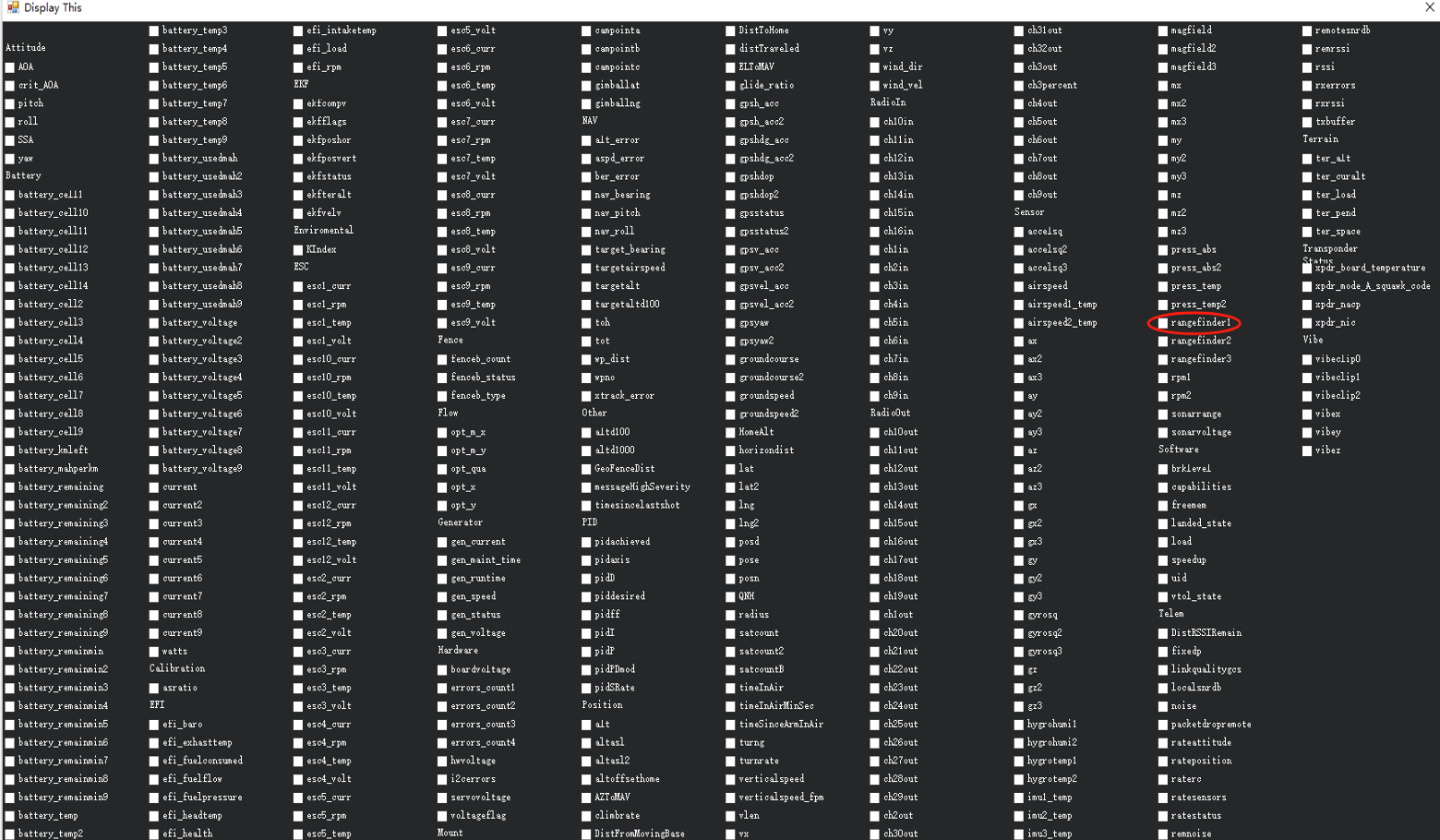
鼠标双击测距实时数据界面界面,出现一个“display this”界面,在其中勾选“rangefinder1”
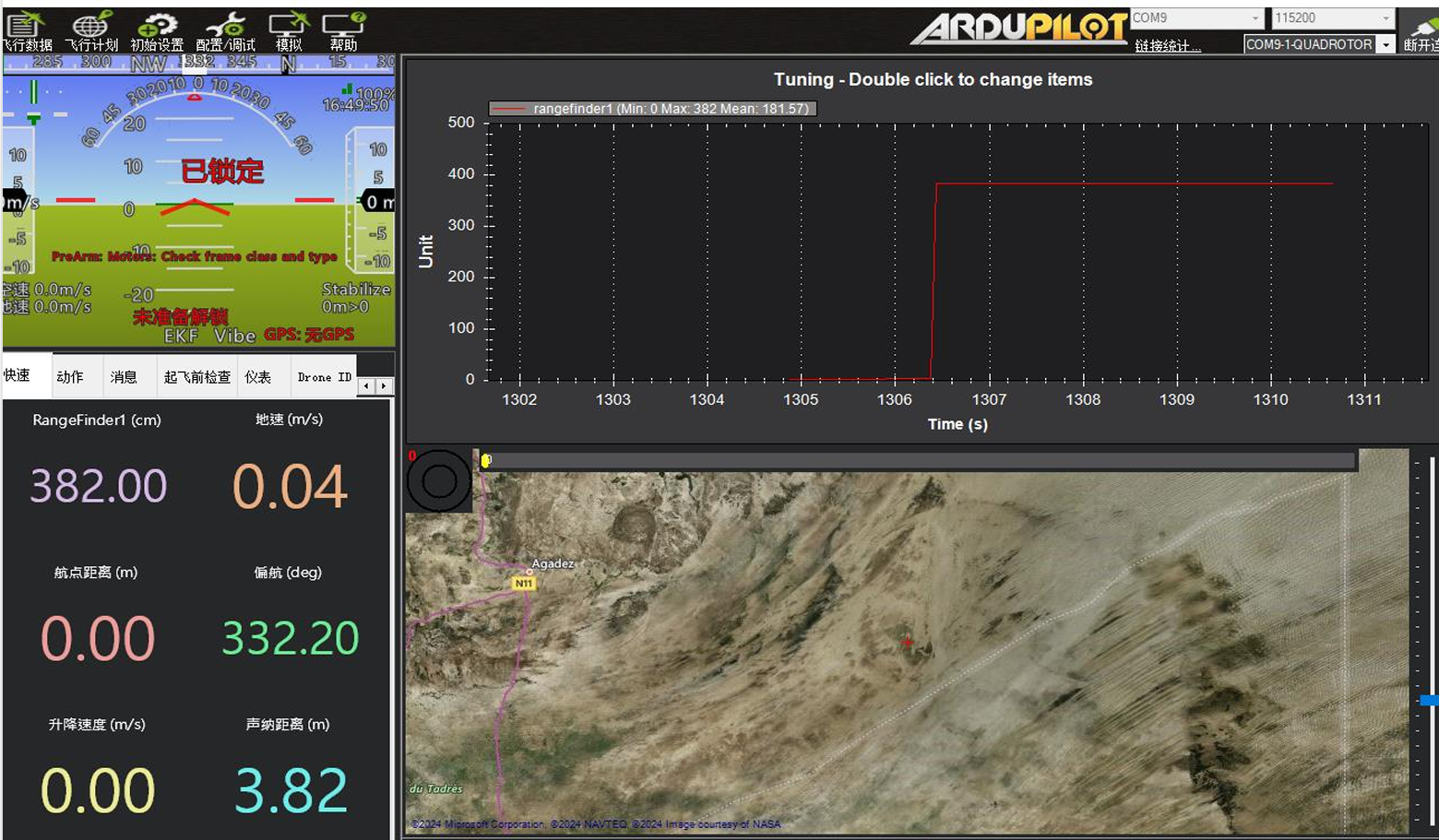
回到测距数据实时界面,通过界面右下角,或者调试界面,能实时观测到无人机飞行的高度
常见问题
OneRadar RA15的角度精度如何?
答:本雷达天线为一发一收的毫米波高度计雷达传感器,不能测目标的角度。而雷达具有两个以上接收天线才有具有角度分辨率能力,天线越多角度分辨精度越高。
在测高时,遇到植被跟地面,会以哪个目标为准?地面有水时,是以地面为准还是水面?
答:在实际运用时要分高度,如果高度低于3m,此时飞机下面气流大,植被很可能被吹开,那么参考点则是地面或者水面。如果飞机达到5m了,气流已经不影响下面植被,如果植被密度大,则此时参考点变为植被。
上一个
OneRadar R82雷达用户手册
下一个
OneRC R20
最近修改: 2026-02-02Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲