多旋翼无人机PID调参教程
多旋翼无人机PID调参教程 | PX4
一、概述
本教程针对应用广泛的串级PID控制器(外环控制姿态角、内环控制姿态角速率,遵循时标分离假设,即内环响应远快于外环),聚焦多旋翼飞机(垂起飞行器旋翼部分),以PX4固件为例讲解调参方法,为用户提供参考。
固定翼、直升机、多旋翼的调参逻辑类似,但参数敏感性差异显著——直升机对参数极度敏感,固定翼参数适应范围广、最易调试,多旋翼介于两者之间。
本教程整理于网络,参考来源如下,感谢作者分享!
参考文献一:http://www.360doc.com/content/22/0206/22/70238708_1016223765.shtml
参考文献二:https://www.bookstack.cn/read/TranslationPx4/3_Tutorial-multicopter-PID-tuning.md
PID控制逻辑
PX4通过multirotor_att_control应用程序实现姿态控制,核心分为内外环结构:
- 外环(姿态角控制):通过比例控制(P参数)输出期望机体角速度,修正姿态角偏差(例如:存在30度横滚角偏移时,将输出对应角速度指令补偿);
- 内环(姿态角速率控制):通过独立PID控制器调节电机输出,使飞行器精准跟踪外环指令的角速度,抵消外界扰动。
机型差异与安全提示
- 机型参数敏感性:直升机对参数极度敏感,固定翼参数适应范围广、最易调试,多旋翼介于两者之间;
- 安全准则:
- 调参时禁止使用碳纤维桨、增强型碳纤维桨或损坏的桨叶;
- 默认增益参数偏小,需逐步增大,避免因参数突变导致炸机;
- 增益过大(即使仅为最优值的1.5-2倍)可能引发危险振荡,需谨慎调整。
调参准备
- 完成电调校准,确保电机响应正常;
- 验证PWM_MIN参数:
- 不装桨叶上电,将油门打到最低位置;
- 沿俯仰、滚转、偏航三个方向各晃动45度(角度可按最大姿态角调整);
- 确认无电机停转,避免极端姿态时力/力矩失衡;
- 开启SDLOG_PROFILE参数的high rate选项,便于后续通过Flight Review或QGroundControl分析数据;
- 将MC_AIRMODE参数置0,电机饱和时优先保障姿态控制;
- 初始化参数(避免发散风险):
- 所有MC_XXX_P(ROLL、PITCH、YAW)初始设为0;
- 仅MC_ROLLRATE_P、MC_PITCHRATE_P设为0.02,其余MC_XXXRATE_P/I/D设为0;
- MC_YAW_FF初始设为0.5;
- 姿态相关参数可先统一减少20%,再按步骤调整。
分步调参方法
试飞全程使用Manual/Stablized模式,禁止Acro模式
参数调整需循序渐进,每次增加10%-30%(微调阶段可降至10%),每次调整后落地确认设置,再试飞验证,避免一次性大幅修改。
第1步:稳定横滚/俯仰角速度(内环PID调试)
1. P增益(MC_ROLLRATE_P/MC_PITCHRATE_P)调节
- 操作:油门推至50%使飞机接近失重状态,打杆倾斜飞机(横滚/俯仰方向),观察响应;
- 标准:飞机应温和对抗倾斜运动(不试图回水平),无振荡;
- 调整逻辑:响应过慢则每次增加10%-20%,直至出现轻微振荡,再降低10%左右;最终典型值约0.1。
2. D增益(MC_ROLLRATE_D/MC_PITCHRATE_D)调节
- 前提:P增益已调至接近最优(轻微振荡状态);
- 操作:从0.01开始逐步增加D增益,观察飞机是否消除振荡;
- 标准:无振荡、无电机颤抖;
- 调整逻辑:电机颤抖说明D增益过大,需调低;典型值0.01-0.02。
3. I增益(MC_ROLLRATE_I/MC_PITCHRATE_I)调节
- 适用场景:角速度始终达不到设定值、存在漂移时;
- 操作:从对应P增益的5%-10%开始逐步增加;
- 标准:消除静差,无额外振荡。
第2步:稳定横滚/俯仰角(外环P参数调试)
1. P增益(MC_ROLL_P/MC_PITCH_P)调节
- 操作:推油门使飞机悬停,倾斜飞机(横滚/俯仰方向),观察是否缓慢回水平;
- 标准:姿态角超调量10%-20%,无振荡;
- 调整逻辑:出现振荡则调低,响应过慢则逐步增加,典型值约3.0;
- 验证:通过QGroundControl查看ATTITUDE.roll/pitch曲线,确保超调符合要求。
第3步:稳定偏航角速度(内环PID调试)
1. P增益(MC_YAWRATE_P)调节
- 操作:推油门使飞机悬停,转动飞机(偏航方向),观察电机声音变化及对抗效果;
- 标准:飞机温和对抗偏航转动,响应弱于横滚/俯仰为正常,无振荡、无剧烈抖动;
- 调整逻辑:振荡或抖动则调低,响应过强则继续减小;典型值0.2-0.3。
第4步:稳定偏航角(外环P参数+前馈调试)
1. P增益(MC_YAW_P)调节
- 操作:推油门使飞机悬停,转动飞机(偏航方向),观察是否缓慢回初始航向;
- 标准:偏航角超调量≤2%-5%,无振荡;
- 调整逻辑:振荡则调低,响应过慢则逐步增加;典型值2.0-3.0;
- 验证:通过QGroundControl查看ATTITUDE.yaw曲线。
2. 前馈(MC_YAW_FF)调节
- 作用:优化偏航响应速度,避免滞后或过快;
- 调整逻辑:有效范围0-1,典型值0.8-0.9(航拍需平滑响应可偏小);
- 验证:通过QGroundControl查看偏航角曲线,确保超调符合要求。
第5步:前馈参数与辅助参数微调
- 滚转/俯仰前馈(MC_ROLLRATE_FF/MC_PITCHRATE_FF):姿态响应慢则增大,过于灵敏则降低,避免干扰角速率环控制;
- 角度/角速率限幅参数:电机余量不足则限制偏小,电机能力充足可适当放宽;
THR_MDL_FAC参数是用来修正升力和PWM输出值的关系的,我们经常发现在悬停状态时飞机的姿态控制好好的,但是到了快速爬升和下降时,飞机就出现姿态不稳的现象,就是因为力和PWM的输出不是线性关系,所以会出现不同油门值的时候控制效果不一样,这个参数用于解决悬停时姿态稳定,但快速爬升 / 下降时姿态不稳的问题。
四、数据分析
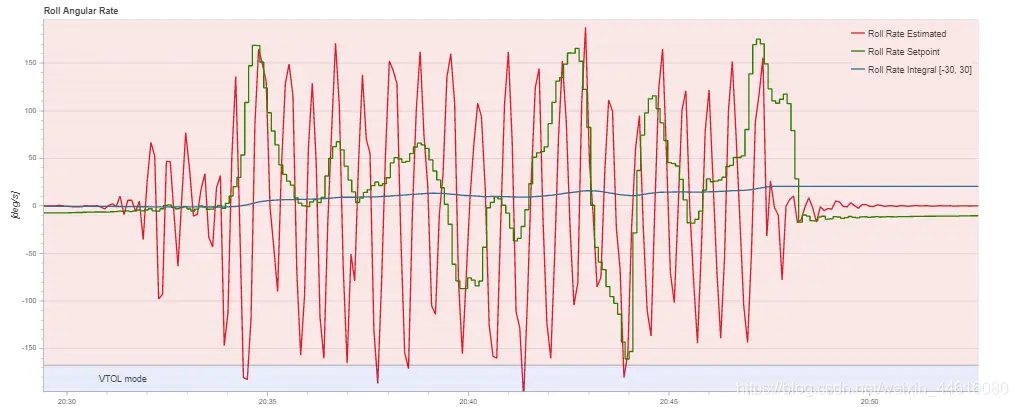
可使用Flight Review或QGroundControl分析数据,核心关注角度/角速率跟踪情况及电机是否饱和。以下为不同控制效果的曲线参考(注:除第一张图外,其余均为大尺寸飞机曲线,响应速度慢于小尺寸飞机):
Flight Review网站地址:https://logs.px4.io/
1. 角速率跟踪良好:曲线贴合期望指令

2. 角速率跟踪不良:曲线围绕期望指令振荡,需调整P/D增益
3. 姿态跟踪良好:角度曲线快速贴近期望指令

4. 姿态跟踪不良:角度曲线偏离期望指令,或超调量过大,需调整外环P增益

调参注意事项
- 参数调整需循序渐进,避免一次性大幅修改;
- 每次调整参数后,需落地确认设置,再进行试飞验证;
- 反复调试、总结规律,逐步掌握调参技巧。
补充说明
- 电机带限机制(Motor Band / Limiting):PX4混控器会自动限制电机转速范围,若某电机超出安全范围,系统会降低总推力以保障姿态稳定(可能轻微掉高,但避免翻转);
- 进阶提示:PID控制在多数场景下已足够,PX4支持切换至MPC(模型预测控制),但需精确系统模型,适合高级用户尝试。
核心参数汇总表
| 参数类别 | 参数名称 | 核心功能 | 典型取值范围 |
|---|---|---|---|
| 外环姿态角控制(P参数) | MC_ROLL_P | 滚转角比例控制,输出期望滚转角速率 | 3.0左右 |
| 外环姿态角控制(P参数) | MC_PITCH_P | 俯仰角比例控制,输出期望俯仰角速率 | 3.0左右 |
| 外环姿态角控制(P参数) | MC_YAW_P | 偏航角比例控制,输出期望偏航角速率 | 2.0-3.0 |
| 内环角速率控制(P参数) | MC_ROLLRATE_P | 滚转角速率核心控制,影响灵敏度与误差响应速度 | 0.02(初始)→ 0.1(典型) |
| 内环角速率控制(P参数) | MC_PITCHRATE_P | 俯仰角速率核心控制,影响灵敏度与误差响应速度 | 0.02(初始)→ 0.1(典型) |
| 内环角速率控制(P参数) | MC_YAWRATE_P | 偏航角速率核心控制,对抗偏航转动扰动 | 0.1(初始)→ 0.2-0.3(典型) |
| 内环角速率控制(I参数) | MC_ROLLRATE_I | 消除滚转角速率跟踪静差,应对持续扰动 | MC_ROLLRATE_P的5%-10% |
| 内环角速率控制(I参数) | MC_PITCHRATE_I | 消除俯仰角速率跟踪静差,应对持续扰动 | MC_PITCHRATE_P的5%-10% |
| 内环角速率控制(I参数) | MC_YAWRATE_I | 消除偏航角速率跟踪静差,应对持续扰动 | 初始设为0,按需微调 |
| 内环角速率控制(D参数) | MC_ROLLRATE_D | 抑制滚转角速率振荡与超调,与噪声相关 | 0.01-0.02 |
| 内环角速率控制(D参数) | MC_PITCHRATE_D | 抑制俯仰角速率振荡与超调,与噪声相关 | 0.01-0.02 |
| 内环角速率控制(D参数) | MC_YAWRATE_D | 抑制偏航角速率振荡与超调,与噪声相关 | 初始设为0,按需微调 |
| 前馈控制参数 | MC_ROLLRATE_FF | 滚转角速环输出直接反馈至电机,提升响应速度 | 按需调整(响应慢则增大,灵敏则降低) |
| 前馈控制参数 | MC_PITCHRATE_FF | 俯仰角速环输出直接反馈至电机,提升响应速度 | 按需调整(响应慢则增大,灵敏则降低) |
| 前馈控制参数 | MC_YAW_FF | 偏航速度控制器前馈比例,影响偏航响应灵敏度 | 0.5(初始)→ 0.8-0.9(典型),航拍可偏小 |
| 最大角速率限制 | MC_ROLLRATE_MAX | 限制最大滚转角速率 | 按电机性能调整 |
| 最大角速率限制 | MC_PITCHRATE_MAX | 限制最大俯仰角速率 | 按电机性能调整 |
| 最大角速率限制 | MC_YAWRATE_MAX | 限制最大偏航角速率 | 按电机性能调整 |
| 辅助参数 | PWM_MIN | 保证电机最低转速,避免极端姿态时停转 | 需验证(解锁后电机持续运转) |
| 辅助参数 | SDLOG_PROFILE | 开启high rate选项,便于姿态控制效果分析 | 开启对应选项 |
| 辅助参数 | MC_AIRMODE | 电机饱和时优先保障姿态控制 | 置0 |
| 辅助参数 | THR_MDL_FAC | 修正升力与PWM输出的非线性关系 | 按需调整(解决爬升/下降时姿态不稳) |
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)