请输入
菜单
旋翼定速器(RSC)设置
与传统多旋翼不同,直升机的油门遥控输入通道在任何飞行模式下都不会直接控制发动机油门,即使是多旋翼里所谓的“非定高模式”或“非油门控制模式”(如 STABILIZE 或 ACRO)。
在这些模式下,遥控器油门摇杆仅直接控制总距(Collective),而非发动机转速。
⚠️ 例外:RC 直通(RC Passthrough)RSC 模式,但通常不推荐使用。
因此,必须通过某种方式独立控制发动机油门或 ESC,以在整个飞行包线内保持恒定的旋翼转速。
旋翼定速器(RSC)概述
RSC 通过 heliRSC 输出(SERVOx_FUNCTION = 31) 驱动发动机油门或外部定速器/ESC,以控制旋翼转速。实现方式有三种:
-
开环控制
- 遥控器直通(RC Passthrough)
- 内部油门曲线(Throttle Curve):根据总距指令插值出对应油门值
-
外部定速器/ESC
- 向外部 ESC 或内燃机定速器发送设定点信号
-
ArduPilot 内置闭环定速器(Governor)
- 需安装转速传感器
- 以油门曲线为前馈,闭环控制转速
⚠️ 当电机互锁(Motor Interlock)未接通时,系统处于“油门保持(Throttle Hold)”状态,heliRSC 输出被强制为 H_RSC_IDLE。
RSC 模式(H_RSC_MODE)
先设置参数 H_RSC_MODE:
| 模式值 | 名称 | 说明 |
|---|---|---|
| 1 | RC Passthrough | 直通遥控器通道(需配置 RCx_OPTION = 32,Motor Interlock)。仅当该通道 > 1200 µs 时,heliRSC 才跟随 RC 输入;否则输出 H_RSC_IDLE。强烈不推荐,一旦遥控失联极易坠机。 |
| 2 | RSC Setpoint | 用于带内置定速功能的 ESC 或外置机械定速器。输出 PWM 由 H_RSC_SETPOINT 百分比与对应 SERVO 输出的 MIN/MAX 线性换算。电动直升机最常用。 |
| 3 | Throttle Curve | 开环油门曲线,五段样条拟合,根据总距(油门杆)插值输出 heliRSC。需手动整定,常用于 Governor 模式前的基准曲线调试。 |
| 4 | Governor | ArduPilot 内置闭环定速器,需转速传感器。以模式 3 的油门曲线为前馈,闭环维持设定转速。适用于无外部定速器的内燃机/涡轮直升机,也可用于无定速功能的电动 ESC。 |
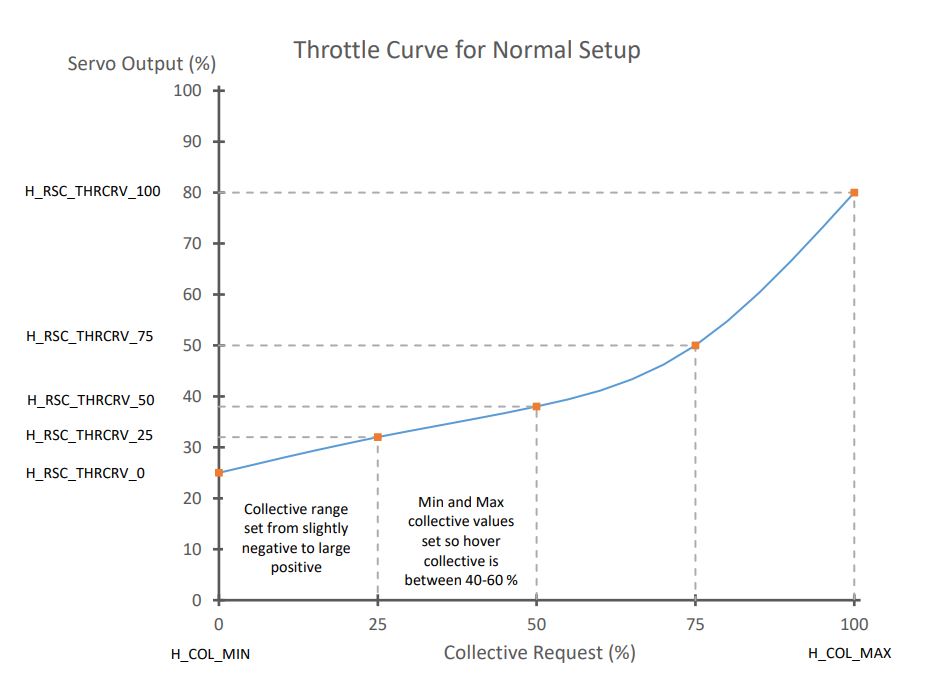
典型油门曲线(H_RSC_MODE = 3)
模式 4 也复用同一条曲线作为前馈。
-
常规(非特技)总距范围:约 -2° ~ +12°
曲线形状类似传统“对称下凹”曲线,低空转、高总距时大油门。
-
特技对称总距范围:约 -12° ~ +12°
0° 总距对应约 50 % 油门,负总距侧同样维持足够扭矩。
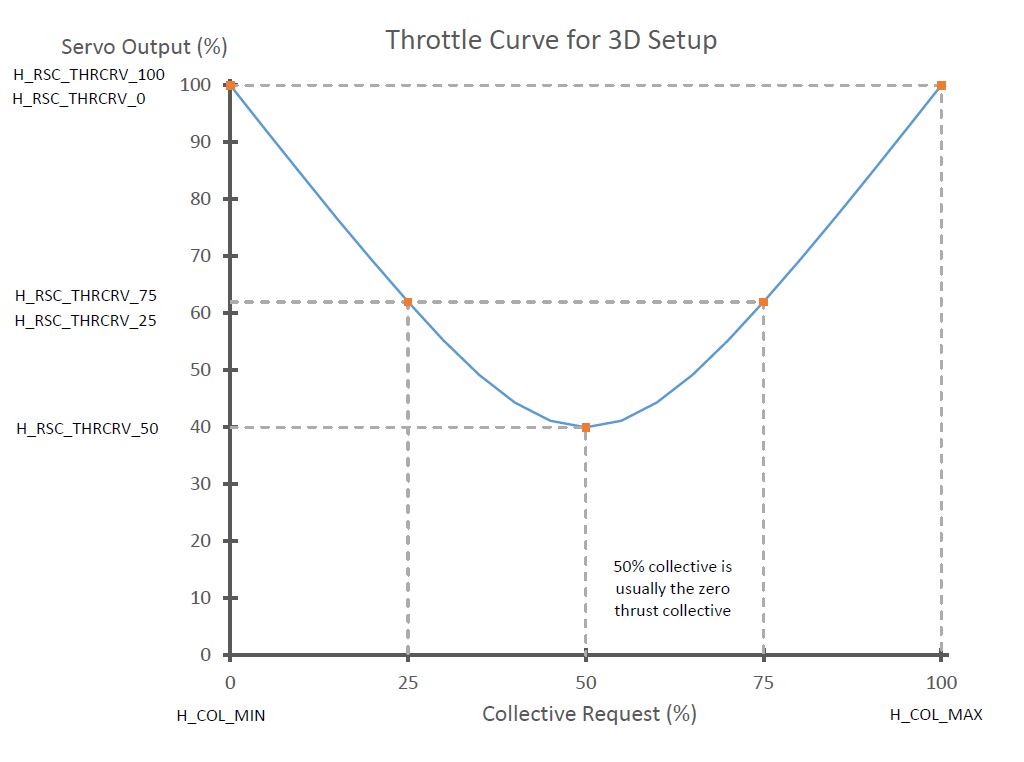
ArduPilot 会在五个设定点之间做样条插值,保证输出平滑。
转速斜坡与空转设置
| 参数 | 功能 |
|---|---|
H_RSC_IDLE |
解锁后、Motor Interlock 接通前的地面空转输出值。 |
H_RSC_RAMP_TIME |
从空转到飞行油门的爬升时间(秒)。 |
H_RSC_RUNUP_TIME |
rotor 真正达到额定转速所需总时间(≥ RAMP_TIME)。系统在此时间内禁止非手动模式起飞/悬停。 |
H_RSC_CRITICAL |
关车过程中,当 runup 计时器倒计时到该百分比时,认为转速已低于安全阈值。建议按“约 3 s”换算:例如 runup=10 s,则设为 70 %。 |
4.0 及以前:自动着陆时一旦转速低于临界值即可自动上锁。
4.1 及以后:自动着陆时必须等待完整 RUNUP_TIME 才允许上锁。
ArduPilot 内置 Governor 设置要点
- 必须先在 模式 3(Throttle Curve) 下把直升机飞稳,整定好五段曲线,作为 Governor 的前馈基准。
- 安装转速传感器(霍尔/光学/电子点火拾取等)。
- 设置 Governor 专用参数组
H_RSC_GOV_*:- 目标转速
H_RSC_GOV_SETPOINT(RPM) - 比例/积分/前馈增益
- 油门曲线上下限钳位
- 目标转速
- 切换至 模式 4,逐步试飞微调。
详见独立章节《Internal RSC Governor》。
涡轮发动机启动专用功能
- 新增 RC 辅助功能编号 159(Turbine Start)。
- 条件:已解锁、RSC 处于 IDLE、开关拨高。
- 动作:RSC 自动把油门推到最大再回到 IDLE,向 ECU 发出“启动序列”信号。
- 开关必须复位且重新上锁后才能再次触发。
4.4+ 手动自旋与重启动(Practice Autorotation)
- 支持在自旋下降后重新接合动力。
- 兼容:
- 带定速的 ESC
- ArduPilot 油门曲线(模式 3)
- ArduPilot 内置 Governor(模式 4)
- 需配置相关转速阈值与重啮合逻辑,详见《Autorotation》页面。
快速选型建议
| 动力类型 | 推荐模式 | 备注 |
|---|---|---|
| 电动 + 定速 ESC | H_RSC_MODE = 2 | 最简单,ESC 自行稳速。 |
| 电动 + 无定速 | H_RSC_MODE = 4 | 需加装转速传感器,用内置 Governor。 |
| 内燃/涡轮 + 外置定速器 | H_RSC_MODE = 2 | 把定速器当 ESC 用。 |
| 内燃/涡轮 + 无定速器 | H_RSC_MODE = 4 | 必须装转速传感器,用内置 Governor。 |
| 仅临时调试 | H_RSC_MODE = 3 | 开环曲线,飞稳后再切 4。 |
再次强调:切勿使用 H_RSC_MODE = 1(RC Passthrough),除非你是非常清楚风险的高级玩家。
上一个
传统直升机——倾斜盘设置
下一个
内置定速器(RSC)
最近修改: 2025-11-11Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲