DShot数字电调使用方法
DShot数字电调
DShot是一种数字式电子电调协议,支持高速、高分辨率的数字通信,有助于提升对载具的控制性能,尤其适用于多旋翼和垂直起降固定翼等应用场景。其优势包括:
- 发送给ESC的数值具备校验和保护
- ESC与飞控之间的时钟差异不会影响飞行性能
- 无需进行ESC校准
DShot是BLHeli/AM32 ESC所采用的底层控制协议。许多BLHeli/AM32版本的ESC还提供诸如ESC配置、ESC遥测、LED控制以及双向DShot等更多功能。若选择支持DShot的ESC,建议优先考虑同时支持BLHeli32、AM32或BLHeli_S的产品。
注意
仅在经过确认支持DShot的ESC上尝试使用该协议,否则可能导致不可预测的结果。
注意
目前市面上出现了越来越多支持DShot及其他数字ESC协议的专有或开源16位/32位ESC,但它们未必支持BLHeli32/AM32特有的功能(如直通配置和遥测)。请参阅具体ESC的说明书以了解其支持的功能。
注意
大多数DShot ESC通常也可作为普通PWM ESC工作。
连接ESC
在4.5及以上版本的固件中,可通过设置参数BRD_IO_DSHOT,使零一飞控在下次启动时加载支持DShot的IOMCU固件。若未出现该参数,则表示该飞控的IOMCU输出不支持DShot。
对于无独立IOMCU协处理器的其他飞控板,任意伺服/电机输出端口均可用于DShot。
更多限制细节请参见下方的“混合ESC协议”章节。
双向DShot
部分飞控板支持双向DShot。
选择DShot波特率
设置参数MOT_PWM_TYPE以选择所需的波特率,并重启飞控:
- DShot150,150k波特(推荐用于大型飞机或信号线较长的情况)
- DShot300,300k波特
- DShot600,600k波特(推荐用于大多数载具)
- DShot1200,1200k波特
对于使用DShot协议的大型飞机,若信号线较长,建议使用最低波特率DShot150,因为其抗干扰能力最强(较低波特率在长线缆上更不易受噪声影响)。
对于小型飞行器,DShot600是目前使用最广泛的协议,因而也更具可靠性,因其经过了大量测试,优于较新的DShot1200协议。
更高波特率(如DShot600和DShot1200)更易受噪声影响,但其优势在于占用DMA通道时间更短,这在DMA资源紧张的飞控上是有利的。
若使用双向DShot,建议优先选择DShot300或DShot600,因为该功能需要更长的脉冲宽度,以便等待ESC回传数据后再发送下一帧。双向DShot不共享DMA通道,因此不会影响其他外设。双向DShot仅支持BLHeli32/AM32 ESC。
配置伺服输出功能
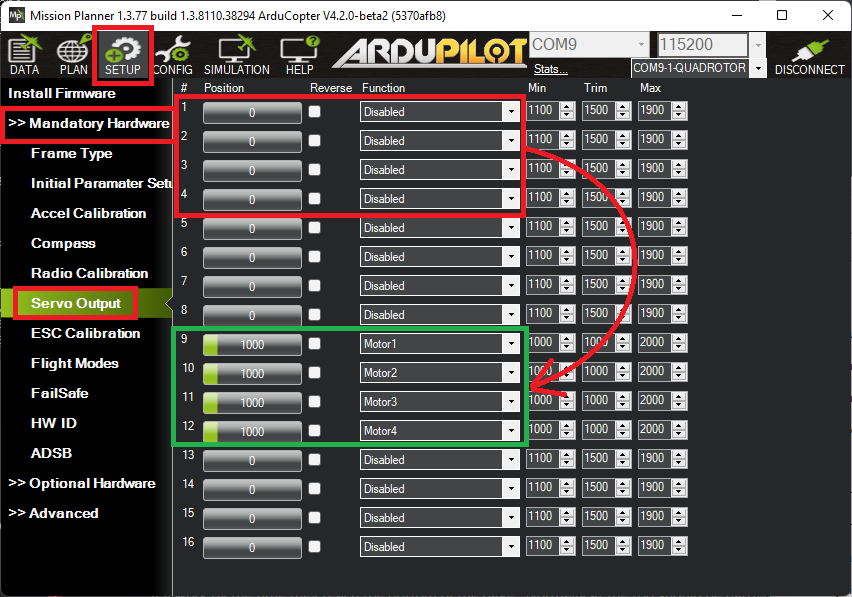
如前所述,若使用带IOMCU的飞控(如零一飞控等),ESC应连接至AUX输出端口,而非默认的MAIN输出端口。因此,需更新对应的servox_function参数,使飞控知晓哪些输出连接至ESC/电机。最简便的方式是使用Mission Planner的“Servo Output”页面进行配置。
注意
一旦某输出被配置为DShot,其对应的servox_min/max/trim参数将被忽略,因为DShot不使用这些参数。可逆输出的中位值为1500,普通输出则为1000,输出范围始终为1000–2000。无需进行ESC校准。
注意
所有基于掩码的配置只能在PWM组级别进行更改,请查阅飞控文档以了解各输出所属的分组。详见下方“混合ESC协议”章节。
警告
请确保ESC支持所选的配置,否则可能造成损坏。包括下文提到的帧率设置。此外,在数字与模拟输出类型之间切换时,若未重新校准ESC,可能导致电机非预期输出。
检查遥控器输入
重启飞控,查看“遥控器状态消息”以确认输出通道配置已生效(参数下载时会自动显示该消息)。

附加配置
DShot更新频率
可通过参数servo_dshot_rate配置DShot脉冲的发送频率。默认情况下,ArduPilot会在每次IMU采样准备好时以及固定1kHz间隔发送DShot数据脉冲。对于标准400Hz调度循环的多旋翼飞行器,这相当于约1.4kHz的输出频率。然而,该输出并不规律——为获得更规律的输出,可设置servo_dshot_rate为调度循环的倍数。例如,设为2则脉冲以800Hz发送,设为3则为1.2kHz,以此类推。更规律的输出有助于对电机控制要求更高的飞行器(如小型竞速机)。不建议低于1kHz,因有报告称部分BLHeli32在低速率下可能丢帧;而更高频率则可提升可靠性并加快丢帧恢复速度,代价是占用更多CPU资源。理论上,DShot150支持的最高频率为4kHz。
DShot指令
部分ESC支持DShot指令,可用于控制ESC的LED、蜂鸣器及电机转向等功能。使用方法如下:
- 设置参数
servo_dshot_esc为所使用ESC的类型(若启用双向DShot遥测或扩展遥测,此项必须设置) - 在参数
ntf_led_types中勾选“DShot”以启用ESC LED控制 - 在参数
ntf_buzz_types中勾选“DShot”以启用电机蜂鸣功能
当前支持的指令包括:
- DShot LED开关
- DShot蜂鸣器开关
- 电机反转(参见参数
servo_blh_rvmask) - 可逆DShot(即3D模式,参见“可逆DShot ESC”章节)
警告
当前ArduPilot仅支持常用的指令集(servo_dshot_esc = 1),但其他指令集可能不兼容,导致未定义行为。在确认ESC支持类型为1之前,请务必拆除桨叶进行测试!
可反向的DShot电调
可反向的DShot(即3D模式)允许电机正反转,这对无人车、船只及需要反推的固定翼尤为重要。
当前仅支持BLHeli32、AM32及BLHeli_S的可逆DShot ESC。使用时,需通过参数servo_blh_3dmask的位掩码指定对应输出通道。该设置将1000–1500–2000的输出值映射为ESC的全速反转–怠速–全速正转。
若已启用DShot指令,ArduPilot将在启动时自动根据servo_blh_3dmask配置ESC为可逆模式(3D模式)。启用后,其他DShot指令也可发送至任意已配置为DShot的ESC。
若未启用指令,则需手动在ESC配置中将“Motor Direction”设为“Bidirectional 3D”。
注意
当前ArduPilot仅支持在固定翼和无人车上使用可逆ESC,不支持多旋翼。
混合ESC协议
尽管ArduPilot的所有伺服/电机输出均支持50Hz及以上的普通PWM输出,但并非所有输出都支持其他ESC协议配置。通常,这些配置必须应用于预设的输出组,即使该组中并非所有通道都连接了ESC。因此请注意以下几点:
- 使用IOMCU的飞控(如X6系列飞控)其8个MAIN输出不支持DShot。仅AUX输出支持。若尝试将MAIN输出设为DShot,实际仍为普通PWM输出。
- 共享同一计时器的输出组必须采用相同的高级配置。具体分组请参见“选择飞控”页面中的硬件描述。例如,若某组中一个输出设为DShot,则该组内其他输出不可设为普通PWM ESC或伺服输出。
注意
每次飞控启动时,都会向地面站发送一条消息,显示各输出为PWM/Oneshot或DShot。剩余编号较高的输出将被分配为GPIO。
IOMCU DShot限制
若已加载支持DShot的IOMCU固件(参见上文“连接ESC”章节),则存在以下限制:
- RCin引脚无法再检测PPM信号
- MAIN输出可支持PWM及普通DShot,其协议分组如下:
- MAIN 1、2:第1组
- MAIN 3、4:第2组
- MAIN 5–8:第3组
所有DShot输出的常规设置步骤依然适用。
参考文档:https://ardupilot.org/copter/docs/common-dshot-escs.html#bidirectional-dshot
;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)