请输入
菜单
直升机飞控系统安装与设置指南
第1页:目录
- 飞控安装与方向设置
- 硬件连接(直升机+配件)
- 水平校准操作
- 直升机核心参数设置
- 常见问题与注意事项
第2页:飞控安装与方向设置
一、飞控安装要求

- 安装位置:优先选择结构稳固、震动小的区域,避免飞控因震动失效
- 安装方式:使用配套泡棉安装,提升稳定性
- 接口示意:明确GPS/I2C、RC IN、BUZZER、POWER等关键端口位置
二、方向参数调整(AHRS_ORIENTATION)

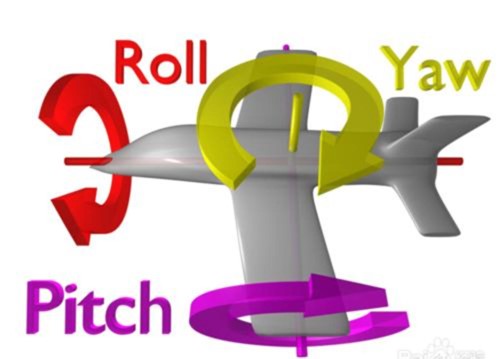
- 作用:当飞控无法按默认箭头方向安装时,调整此参数适配机头位置
- 支持角度:45°/90°等多维度旋转(如Yaw45、Roll90Yaw135等)
- 注意事项:修改后需重启飞控,并重新进行水平校准
三、GPS安装

- 方向设置:可旋转调整,需在指南针校准界面配置
- 安装规范:安装方向需与飞控保持一致,确保定位精准
第3页:硬件连接说明
一、直升机核心连接

- 连接对象:ESC1 副翼(左舵机)、ESC3 升降(后舵机)、ESC2螺距(右舵机)、ESC4尾舵(尾部舵机)、ESC6 电机
- 飞控与ESC连接:飞控分别对应ESC1-4、ESC6
- 供电要求:飞控无电压输出功能,需通过带BEC电调给舵机供电,推荐pm-01电源模块+标准Pixhawk电流计
二、配件连接规范
| 配件 | 连接方式 | 注意事项 |
|---|---|---|
| 电源模块 | 6pin GH插线连接电流计模块至POWER端口 | 确保供电稳定 |
| GPS+罗盘 | 6pin GH插线连接至GPS/I2C端口 | 与飞控安装方向一致 |
| 接收机+蜂鸣器 | 5pin GH插线连接至RC IN/BUZZER端口 | 插紧避免信号中断 |
三、电流计设置

- 开启电池监测器:监控器选“4-电池及电压”、传感器选“0-Other”、APM版本选对应型号(如The Cube/Pixhawk)
- 关闭设置:监控器选“0-disable”
- 验证流程:设置后断开飞控连接→重新上电→输入测量电压→确认显示一致且无跳动
- 异常处理:无法解锁、蜂鸣器快速报警、误触发低压保护,均需重新校准电流计
第4页:水平校准操作
一、校准场景

飞控安装固定后,直升机放置于水平地面时,地面站显示红色水平线与绿色地面不齐平(存在安装误差)
二、校准步骤
- 进入地面站“加速度校准”页面
- 点击“校准水平”,飞控状态灯三色闪烁表示正在校准
- 校准完成后,状态灯恢复初始状态,红色水平线与绿色地面对齐

第5页:直升机设置-前置准备
操作前提(避免电机误启动)
- 断开电调与电机的3根连接线
- 连接锂电池供电
- 通过USB连接飞控与电脑地面站
- 打开路径:配置/调试→必要硬件→直升机安装
- 控制模式限制:仅自稳(Stabilize)模式或Acro特技模式可输出控制,其他模式无法调整测试
设置界面核心功能

- 通道功能:配置每个PWM输出通道的对应功能
- 十字盘设置:类型选择、行程校准等
- 油门设置:怠速、曲线调整等
- 调速器设置:模式选择、参数校准
- 混控设置:适配不同飞行需求
第6页:十字盘设置(类型+行程)
一、十字盘类型选择(HSW TYPE参数)
1. 单/双直升机通道分配
- 单直升机:伺服1-3对应电机33-35;四舵机额外增加伺服5(电机37)
- 双直升机:十字盘1(伺服1-3=电机33-35)、十字盘2(伺服4-6=电机36-38);四舵机额外增加伺服7-8(电机39-40)
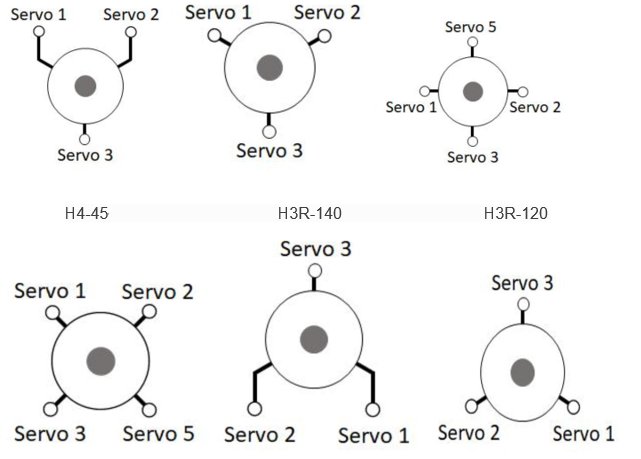
2. 主流类型说明
- H3 Generic:支持自定义伺服位置和相位角(默认斜盘球连杆距主轴等距)
- H1 non-CCPM:伺服1=副翼、伺服2=升降舵、伺服3=主旋翼
- 其他类型:H3-120、H3-140、H4-45、H3R-120/140(适配不同机架结构)
二、十字盘行程设置(限制±10度)
-
动作响应校准:遥控器操作与十字盘动作一致(升降/副翼/油门杆对应十字盘前后/左右/升降),异常时勾选“Reversed”反向舵机
-
水平微调:通过对应舵机的微调值,小范围调整至十字盘水平
-
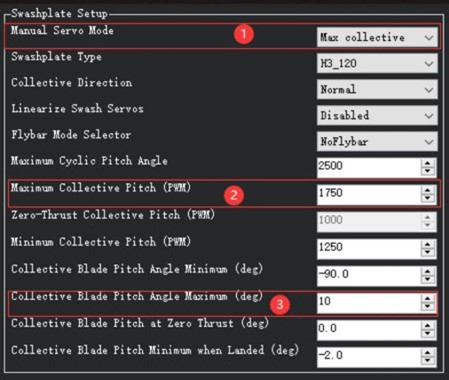
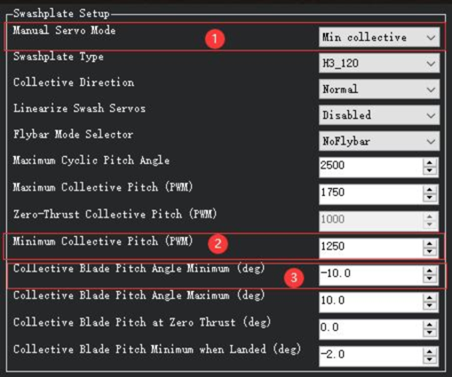
行程校准(搭配螺距尺)
- +10度:Manual Servo Mode设为Max collective→调整参数至螺距尺显示+10度→固定参数为10
- -10度:Manual Servo Mode设为Min collective→调整参数至螺距尺显示-10度→固定参数为-10
- 零度:Manual Servo Mode设为Zero thrust coll→确认螺距尺显示与设置值一致
-
着陆限制参数(H_COL_LAND_MIN)
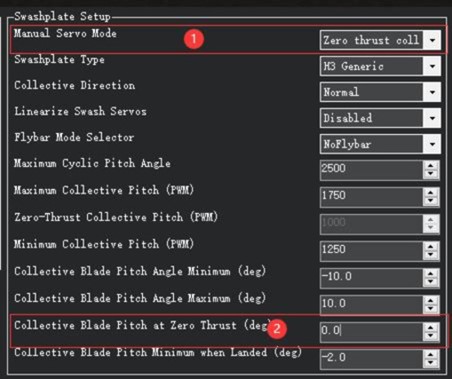
- 默认值:-2度(对称叶片,保证平稳下降)
- 非对称叶片:设为低于零推力桨距角(例:零推力-3度→着陆限制-5度)
第7页:转子转速控制设置
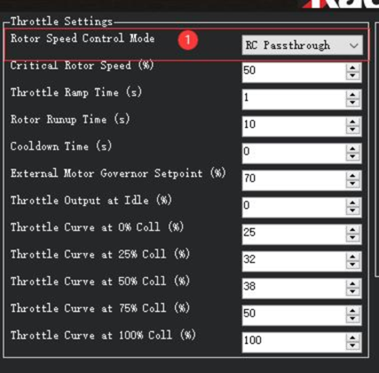
一、RSC模式选择
| 模式类型 | 适用场景 | 核心说明 |
|---|---|---|
| RC Passthrough | 专业高级用户 | 需配置RC接收器保持电机互锁通道值,失联风险高,不推荐常规使用 |
| RSC setpoint | 电动直升机(内置调速器ESC) | 常用模式,PWM输出=RSC SETPOINT×0.01×(SERVOx MAX-MIN)+SERVOx MIN |
| Throttle curve | 开环控制,调速器模式前置校准 | 五点样条曲线拟合,为调速器提供前馈油门曲线基线 |
| AutoThrottle | 活塞/涡轮发动机(无外部调速器) | 需转子速度传感器,需先通过油门曲线模式校准斜坡时间和曲线 |
二、关键参数设置
- 怠速(H_RSC_IDLE):飞机武装后、电机联锁启用前的油门输出值
- 斜坡时间(H_RSC_RAMP_TIME):油门从怠速斜升至飞行设置的时长
- 启动时间(H_RSC_RUNUP_TIME):转子达到飞行转速的时长(≥斜坡时间)
- 临界转速(H_RSC_CRITICAL):建议设为启动计时器3秒对应的百分比(例:10秒启动→70%)
第8页:内部调速器设置(H RSC MODE=4)
一、启用前提
- 已通过Throttle curve模式(H RSC MODE=3)调整好油门曲线(确保飞机可稳定飞行)
- 配备RPM传感器(测量旋翼头速度)
- 配置参数:H RSC THRCRV x(油门曲线)、H RSC GOV x(调速器核心参数)
二、核心参数说明
| 参数名称 | 作用 |
|---|---|
| H_RSC_GOV_COMP | 扭矩补偿器,补偿密度高度变化对转速的影响(每次调整±1%,避免喘振) |
| H_RSC_GOV_DROOP | 下垂补偿器,补偿转速误差(值越高响应越快,需避免喘振和超速) |
| H_RSC_GOV_FF | 前馈增益,应对转子突然加载/卸载(转速下降明显时增大) |
| H_RSC_GOV_RANGE | 调速器运行范围(超出0.5秒则故障转移至油门曲线) |
| H_RSC_GOV_RPM | 主转子目标转速(调速器接合后保持该值) |
| H_RSC_GOV_TORQUE | 扭矩限制器,调整加速时扭矩上升百分比(接合失败则+5%,超速则降低) |
三、特殊场景适配
- ICE/涡轮动力直升机:H_RSC_IDLE设为“发动机空转不带动主旋翼”的输出值
- 自动着陆:检测到着陆后禁用电机联锁,RSC输出切换至怠速,阀芯下降完成后自动解除武装
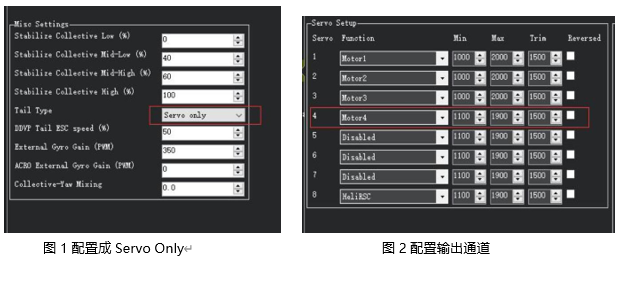
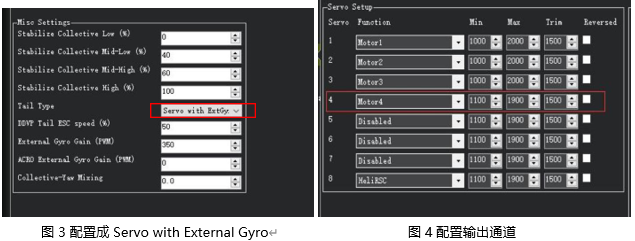
第9页:尾桨设置(H_TAIL_TYPE参数)
三种控制方式对比
| 控制方式 | 适用场景 | 配置步骤 |
|---|---|---|
| Servo Only(仅舵机) | 常规偏航稳定需求 | 1. Tail Type选“Servo Only”;2. SERVOx FUNCTION设为Motor4(4通道输出) |
| Servo with External Gyro(带外置陀螺仪) | 需精准偏航控制 | 1. Tail Type选对应选项;2. SERVOx FUNCTION设为Motor4(4通道输出) |
| DDVP(电机驱动可变螺距) | 高负载飞行场景 | 1. Tail Type选“Direct Drive Variable Pitch”;2. 尾桨桨距舵机=Motor4(4通道);3. 尾电机=HeliTailRSC(7通道) |
 |
第10页:常见问题与注意事项
一、高频故障排查
- 无法解锁/蜂鸣器报警:电流计设置不准确→重新校准电池电压
- 飞行中转速波动:调速器前馈/下垂补偿器参数不当→微调H_RSC_GOV_FF/DROOP
- 尾桨控制失效:通道配置错误→核对SERVOx_FUNCTION参数
- 水平偏差:未完成水平校准或飞控安装松动→重新校准/加固安装
二、安全操作规范
- 所有设置调整前,务必断开电调与电机的连接
- 避免使用RC Passthrough模式(高失联风险)
- 非对称叶片需单独调整H_COL_LAND_MIN参数
- 调速器参数调整遵循“小幅度、逐步测试”原则,避免喘振或超速
最近修改: 2026-01-08Powered by;}.cls-2{fill:%230868f7;}.cls-3{fill:url(%23未命名的渐变_44);}.cls-4{fill:%23333;}%3c/style%3e%3clinearGradient%20id='未命名的渐变_8'%20x1='33.73'%20y1='100.61'%20x2='-0.03'%20y2='-1.06'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%237ae9fb'/%3e%3cstop%20offset='0.67'%20stop-color='%232b90f8'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3clinearGradient%20id='未命名的渐变_44'%20x1='27.86'%20y1='18.67'%20x2='68.36'%20y2='22.22'%20gradientUnits='userSpaceOnUse'%3e%3cstop%20offset='0'%20stop-color='%235ac7f2'/%3e%3cstop%20offset='1'%20stop-color='%230868f7'/%3e%3c/linearGradient%3e%3c/defs%3e%3cpath%20class='cls-1'%20d='M29,28.74V81.91l-9.51-3.68v0L8.52,74A7.17,7.17,0,0,1,4,67.32V24.54A3.76,3.76,0,0,1,9.08,21Z'/%3e%3cpath%20class='cls-2'%20d='M68.09,78.07a13.15,13.15,0,0,1-17.9,12.06L29,81.91h0V28.74L50.19,37A13.17,13.17,0,0,0,68.08,25.3h0Z'/%3e%3cpath%20class='cls-3'%20d='M68.08,25.3a13.19,13.19,0,0,1-6.73,10.87A13.09,13.09,0,0,1,50.19,37L29,28.74V6A3.76,3.76,0,0,1,34.1,2.52l25.59,9.91A13.22,13.22,0,0,1,68.08,25.3Z'/%3e%3cpath%20class='cls-4'%20d='M129.06,81.76a4.33,4.33,0,0,1-3.19-1.31,4.4,4.4,0,0,1-1.31-3.24V56.86H97.65V77.21a4.36,4.36,0,0,1-1.35,3.2A4.68,4.68,0,0,1,93,81.76a4.32,4.32,0,0,1-3.19-1.31,4.37,4.37,0,0,1-1.32-3.24V27.27A4.58,4.58,0,0,1,89.83,24a4.59,4.59,0,0,1,7.82,3.27V48.15h26.91V27.27A4.58,4.58,0,0,1,125.91,24a4.59,4.59,0,0,1,7.82,3.27V77.21a4.37,4.37,0,0,1-1.36,3.2A4.65,4.65,0,0,1,129.06,81.76Z'/%3e%3cpath%20class='cls-4'%20d='M163.77,81.66c-6.57,0-11.76-1.92-15.44-5.7s-5.54-9.07-5.54-15.74a26.76,26.76,0,0,1,2.09-10.43,17.72,17.72,0,0,1,6.67-8.06,19.15,19.15,0,0,1,10.68-2.95,19,19,0,0,1,10.46,2.8,18.7,18.7,0,0,1,6.55,7.36,22.53,22.53,0,0,1,2.36,10.28A4.51,4.51,0,0,1,177,63.77H152.23a10.8,10.8,0,0,0,3.49,6.65c2,1.68,4.88,2.52,8.66,2.52a22.25,22.25,0,0,0,7.54-1.21c.74-.3,1.55-.67,2.37-1.07a3.75,3.75,0,0,1,1.84-.4,4.09,4.09,0,0,1,3,1.15,4,4,0,0,1,1.12,3,4.38,4.38,0,0,1-2.58,3.82,32.34,32.34,0,0,1-6.36,2.61A28.67,28.67,0,0,1,163.77,81.66ZM172.4,55.9a9.72,9.72,0,0,0-1.63-4.56A9.9,9.9,0,0,0,167,48a10.38,10.38,0,0,0-4.64-1.14,12,12,0,0,0-4.77,1.06,9.54,9.54,0,0,0-4.89,5.66,11.78,11.78,0,0,0-.51,2.3Z'/%3e%3cpath%20class='cls-4'%20d='M193,81.64a4.49,4.49,0,0,1-4.51-4.55V27.28A4.58,4.58,0,0,1,189.84,24a4.48,4.48,0,0,1,3.28-1.36A4.36,4.36,0,0,1,196.35,24a4.46,4.46,0,0,1,1.31,3.31V77.09a4.34,4.34,0,0,1-1.35,3.2A4.67,4.67,0,0,1,193,81.64Z'/%3e%3cpath%20class='cls-4'%20d='M263.79,81.71a5.7,5.7,0,0,1-4.2-1.74,5.76,5.76,0,0,1-1.73-4.19V27.37a4.58,4.58,0,0,1,1.35-3.27A4.59,4.59,0,0,1,267,27.37V72.53h24a4.58,4.58,0,0,1,3.27,7.82A4.66,4.66,0,0,1,291,81.71Z'/%3e%3cpath%20class='cls-4'%20d='M424.48,81.74a4.71,4.71,0,0,1-2.71-.88,5.43,5.43,0,0,1-1-1l-.07-.09-12.41-17-5.41,5v9.44a4.31,4.31,0,0,1-1.36,3.19,4.66,4.66,0,0,1-3.3,1.36A4.29,4.29,0,0,1,395,80.42a4.36,4.36,0,0,1-1.32-3.23V27.37A4.58,4.58,0,0,1,395,24.1a4.52,4.52,0,0,1,6.58.12,4.54,4.54,0,0,1,1.24,3.15V56.31l17.72-16.38.05,0a4.8,4.8,0,0,1,2.94-1.11,4.4,4.4,0,0,1,3.27,1.2,4.57,4.57,0,0,1,1.2,3.27,4.44,4.44,0,0,1-.77,2.33,7.45,7.45,0,0,1-1.43,1.65l-11,9.64,13.34,17.68a5,5,0,0,1,1,2.71,4.12,4.12,0,0,1-1.36,3.24A4.64,4.64,0,0,1,424.48,81.74Z'/%3e%3cpath%20class='cls-4'%20d='M317.93,81.76a21.5,21.5,0,1,1,21.17-21.5A21.37,21.37,0,0,1,317.93,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,317.93,47.66Z'/%3e%3cpath%20class='cls-4'%20d='M212.18,101.22a4.12,4.12,0,0,1-3.05-1.26,4.17,4.17,0,0,1-1.26-3.1V43.34a4.37,4.37,0,0,1,1.3-3.14,4.26,4.26,0,0,1,3.13-1.3,4.19,4.19,0,0,1,3.1,1.26,4.32,4.32,0,0,1,1.26,3.16,20.77,20.77,0,0,1,13-4.54,21.51,21.51,0,0,1,0,43,20.51,20.51,0,0,1-13-4.57V96.86a4.15,4.15,0,0,1-1.3,3.06A4.5,4.5,0,0,1,212.18,101.22Zm17.43-53.63c-6.23,0-12.93,4.11-12.93,12.72a12.73,12.73,0,0,0,25.46,0A12.71,12.71,0,0,0,229.61,47.59Z'/%3e%3cpath%20class='cls-4'%20d='M365.76,81.76a21.5,21.5,0,1,1,21.18-21.5A21.37,21.37,0,0,1,365.76,81.76Zm0-34.1a12.61,12.61,0,1,0,12.42,12.6A12.52,12.52,0,0,0,365.76,47.66Z'/%3e%3c/svg%3e)
大纲